Graph Neural Networks - II
CSE 891: Deep Learning
Wednesday October 28, 2020
Recap: Graph Structured Data

Standard CNN and RNN architectures don't work on this data.
- Slide Credit: Xavier Bresson
Recap: Graph Definition
- Graphs $\mathcal{G}$ are defined by:
- Vertices $V$
- Edges $E$
- Adjacency matrix $\mathbf{A}$
- Features:
- Node features: $\mathbf{h}_i, \mathbf{h}_j$ (user type)
- Edge features: $\mathbf{e}_{ij}$ (relation type)
- Graph features: $\mathbf{g}$ (network type)

Recap: Chebyshev Polynomials

- Slide Credit: Xavier Bresson
Isotropic Filters

Spatial Graph ConvNets
Template Matching
- How to define template matching for graphs?
- Main issue is the absence of node ordering/positioning.
- Node indices are arbitrary and do not match the same information.
- How to design template matching invariant to node re-parametrization ?
- Simply use the same template features for all neighbors !
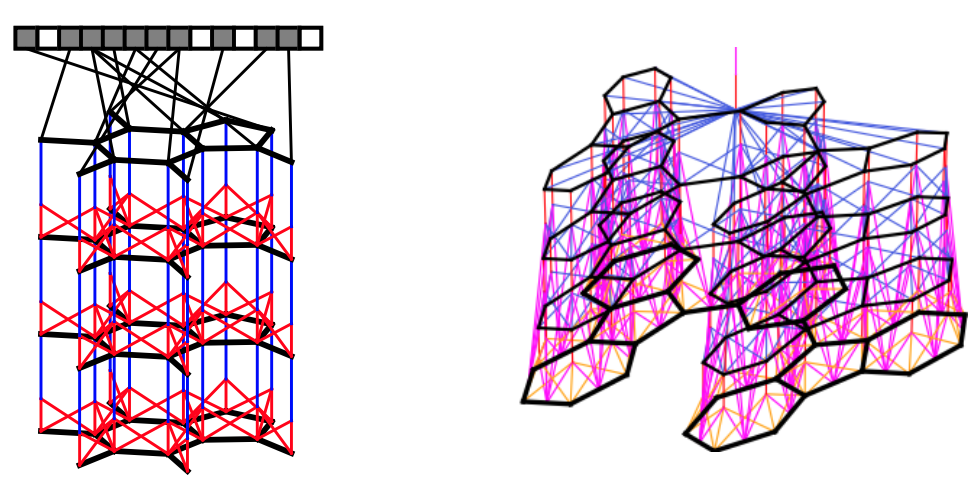
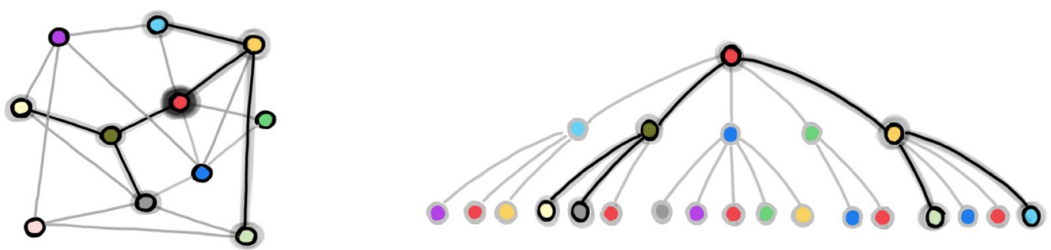
- Message Passing Neural Networks
- Use neural network to mimic unrolled message passing in graphs.
- Figure Credit: David Duvenaud
Template Matching
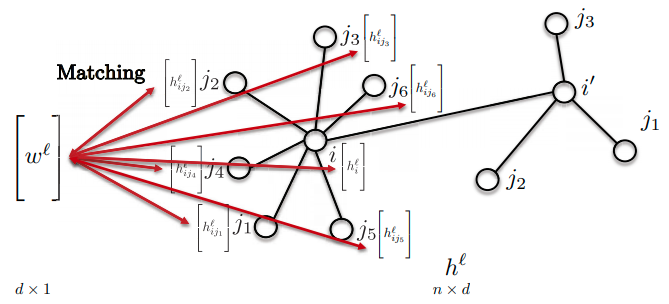
- One Feature: $$\begin{equation}h_i^{(l+1)}=\sigma\left(\sum_{j\in\mathcal{N}_i}(\mathbf{w}^l)^T \mathbf{h}^l_{ij}\right)\end{equation}$$
- $d$ Feature: $$\begin{equation}\mathbf{h}_i^{(l+1)}=\sigma\left(\sum_{j\in\mathcal{N}_i}\mathbf{W}^l \mathbf{h}^l_{ij}\right)\end{equation}$$
- Vector Representation: $$\begin{equation}\mathbf{h}_i^{(l+1)}=\sigma\left(\mathbf{A}\mathbf{h}^l\mathbf{W}^l\right)\end{equation}$$
- Figure Credit: Xavier Bresson
Vanilla Spatial GCN
- Simplest formulation of spatial GCNs
- Handle the absence of node ordering
- Invariant by node re-parametrization
- Deal with different neighborhood sizes
- Local reception field by design (only neighbors are considered)
- Weight sharing (convolution property)
- Independent of graph size
- Limited to isotropic capability
$$\begin{equation}\mathbf{h}_i^{(l+1)}=\sigma\left(\mathbf{A}\mathbf{h}^l\mathbf{W}^l\right)\end{equation}$$
$$\begin{equation}\mathbf{h}_i^{(l+1)}=\sigma\left( \frac{1}{d_i} \sum_{j \in \mathcal{N}_i} A_{ij}\mathbf{W}^l\mathbf{h}^l_j\right)\end{equation}$$
$$\begin{equation}\mathbf{h}_i^{(l+1)}=f_{GCN}(\mathbf{h}_i^l,{\mathbf{h}_j^l:j\rightarrow i})\end{equation}$$
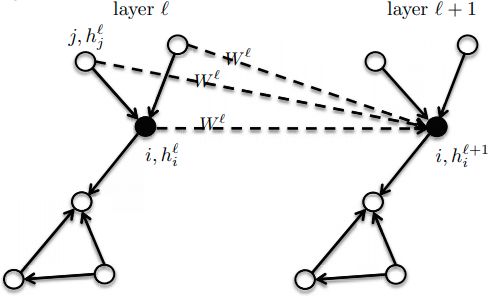
- Figure Credit: Xavier Bresson
Graph Convolutional Networks

- Figure Credit: Michael Bronstein
GCN Challenges


- Figure Credit: Michael Bronstein
GraphSage
- Vanilla GCNs (supposing $A_{ij}$ = 1): $h_i^{(l+1)}=\sigma\left(\frac{1}{d_i}\sum_{j\in\mathcal{N}_i}W^lh^l_j\right)$
- GraphSage:
- Differentiate template weights $W^l$ between neighbors $h_j$ and central node $h_i$. $$\begin{equation}\mathbf{h}_i^{(l+1)}=\sigma\left( \mathbf{W}^l_1\mathbf{h}^l_i + \frac{1}{d_i} \sum_{j \in \mathcal{N}_i} \mathbf{W}^l_2\mathbf{h}^l_j\right)\end{equation}$$
- Isotropic GCNs
- Variations:
- Instead of mean, use Max, LSTM etc.
GraphSage
- How do we scale to large graphs?
- Mini-Batch Training:
- Samples are not IID anymore.
- How do we sample?
- Figure Credit: Michael Bronstein
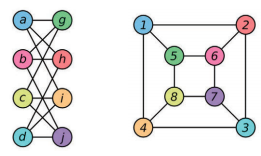
Graph Isomorphism Networks
- Graph isomorphism is an equivalent relation for similar graph structures.
- Architecture that can differentiate graphs that are not isomorphic.
- Isotropic GCNs
$$\begin{eqnarray}
\mathbf{h}_i^{(l+1)} &=& ReLU \left( \mathbf{W}_2^l ReLU\left(BN\left(W_1^l\hat{h}_i^{l+1}\right)\right) \right) \\
\hat{h}_i^{l+1} &=& (1+\epsilon)h_i^l + \sum_{j\in\mathcal{N}_i}h_j^l
\end{eqnarray}$$
Anistropic GCNs
- Reminder:
- Standard ConvNets produce anisotropic filters because Euclidean grids have directional structures (up, down, left, right).
- GCNs such as ChebNets, CayleyNets, Vanilla GCNs, GraphSage, GIN compute isotropic filters as there is no notion of directions on arbitrary graphs.
- How to get anisotropy back in GNNs?
- Natural edge features if available (e.g. different bond connections between atoms).
- We need an anisotropic mechanism that is independent of the node parametrization.
- Idea: Graph attention mechanism can treat neighbors differently.
Graph Attention Networks
- GAT uses the attention mechanism to introduce anisotropy in the neighborhood aggregation function.
- The network employs a multi-headed architecture to increase the learning capacity, similar to the Transformer.
$$
\begin{eqnarray}
h_i^{l+1} &=& Concat_{k=1}^K(ELU(\sum_{j\in\mathcal{N}_i}\alpha_{ij}^{k,l}W_1^kh_j^l)) \\
\alpha_{ij}^{k,l} &=& Softmax_{\mathcal{N}_i}(\hat{\alpha}_{ij}^{k,l}) \\
\hat{\alpha}_{ij}^{k,l} &=& LeakyReLU(W_2^{k,l}Concat(W_1^{k,l}h_i^l,W_1^{k,l}h_j^l))
\end{eqnarray}
$$
- Attention mechanism in a one-hop neighborhood

Graph Transformers
- Graph version of Transformer: $$\begin{eqnarray} h_i^{l+1} &=& W^lConcat_{k=1}^K(\sum_{j\in\mathcal{N}_i}\alpha_{ij}^{k,l}V^{k,l}h_j^l) \\ \alpha_{ij}^{k,l} &=& Softmax_{\mathcal{N}_i}(\hat{\alpha}_{ij}^{k,l}) \\ \hat{\alpha}_{ij}^{k,l} &=& (Q^{l,k}h_i^l)^TK^{l,k}h_j^l \end{eqnarray}$$
- Attention mechanism in a on-hop neighborhood
Transformers
- Transformers is a special case of GCNs when the graph is fully connected.
- The neighborhood $\mathcal{N}_i$ is the whole graph.
$$\begin{eqnarray} h_i^{l+1} &=& W^lConcat_{k=1}^K(\sum_{j\in\mathcal{N}_i}\alpha_{ij}^{k,l}V^{k,l}h_j^l) \\ \alpha_{ij}^{k,l} &=& Softmax_{\mathcal{N}_i}(\hat{\alpha}_{ij}^{k,l}) \\ \hat{\alpha}_{ij}^{k,l} &=& Q^{l,k}h_i^lK^{l,k}h_j^l \end{eqnarray}$$

Transformers
- What does it mean to have a graph fully connected?
- It becomes less useful to talk about graphs as each data point is connected to all other points. There is no particular graph structure that can be used.
- It would be better to talk about sets rather than graphs in this case.
- Transformers are Set Neural Networks.
- They are today the best technique to analyze sets/bags of features.
Applications
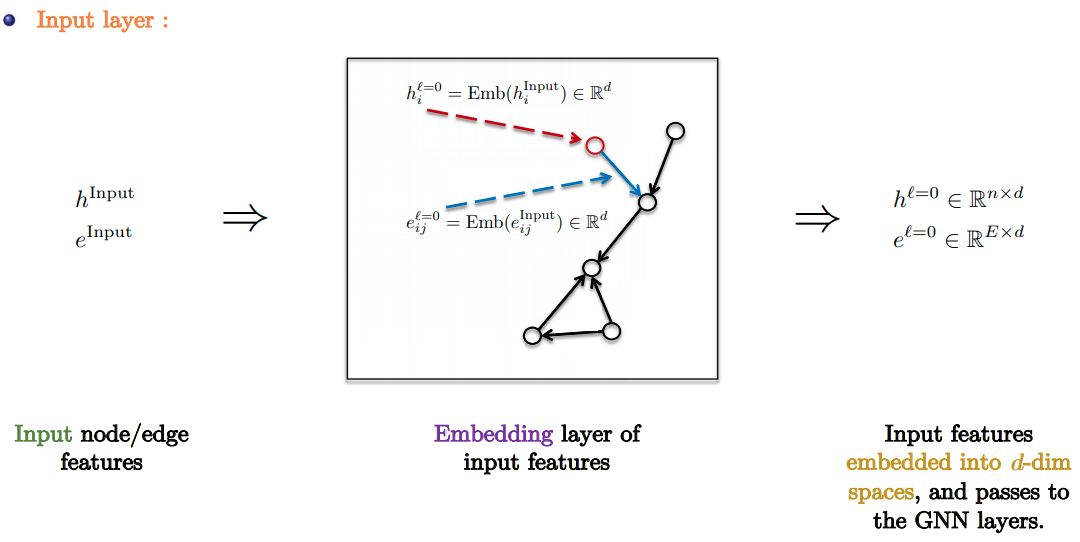
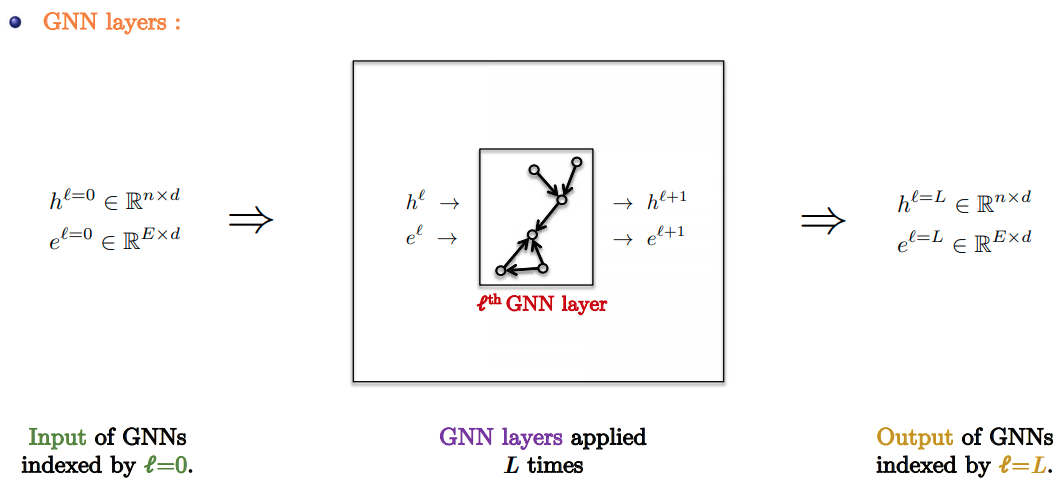
GNN Pipeline
- Standard GNN Pipeline:
- Input Layer: Linear embedding of input node/edge features.
- GNN Layers: Apply favorite GNN layer $L$ times.
- Task-based layer : Graph/node/edge prediction layer.

GNN Pipeline
- Slide Credit: Xavier Bresson
GNN Pipeline
- Slide Credit: Xavier Bresson
GNN Pipeline

- Slide Credit: Xavier Bresson
Node Classification

- Figure Credit: Jure Leskovec
Link Prediction

- Figure Credit: Jure Leskovec
Social Networks

- Figure Credit: Michael Bronstein
Social Networks
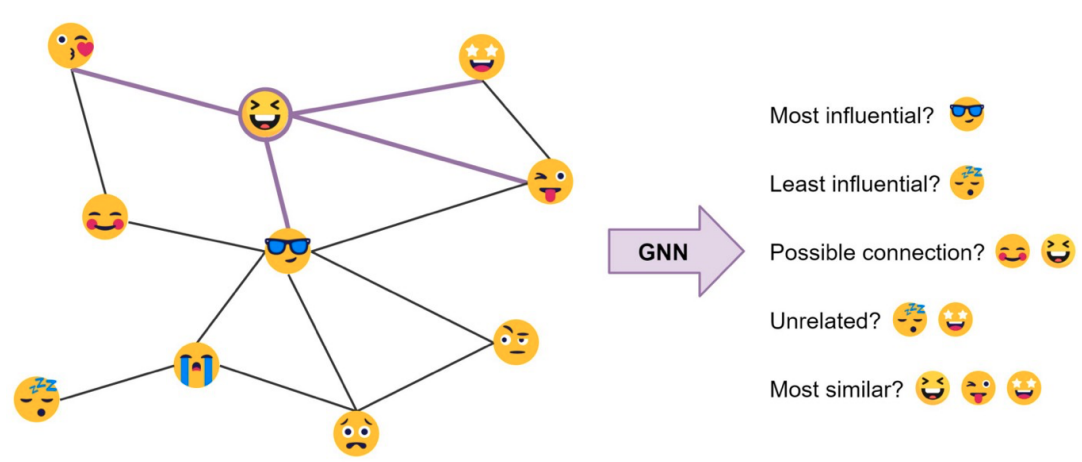
- Figure Credit: Chaitanya Joshi
Quantum Chemistry
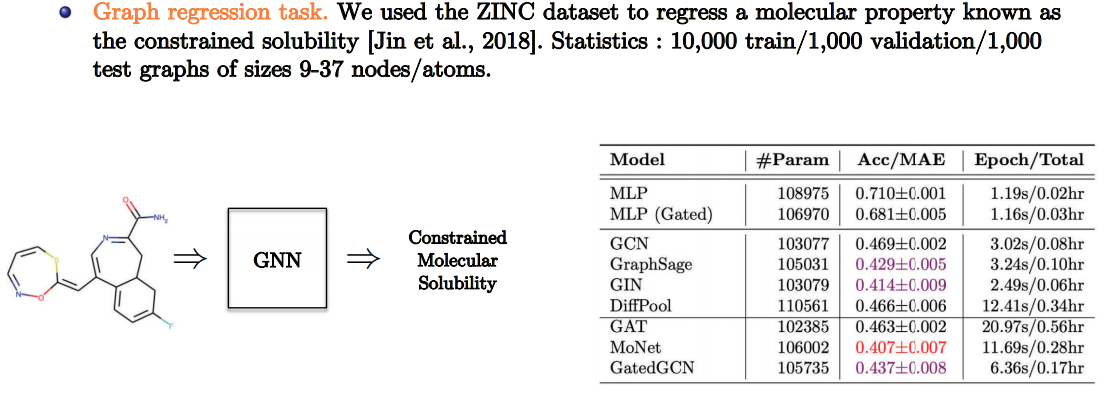
- Slide Credit: Xavier Bresson
Computer Vision
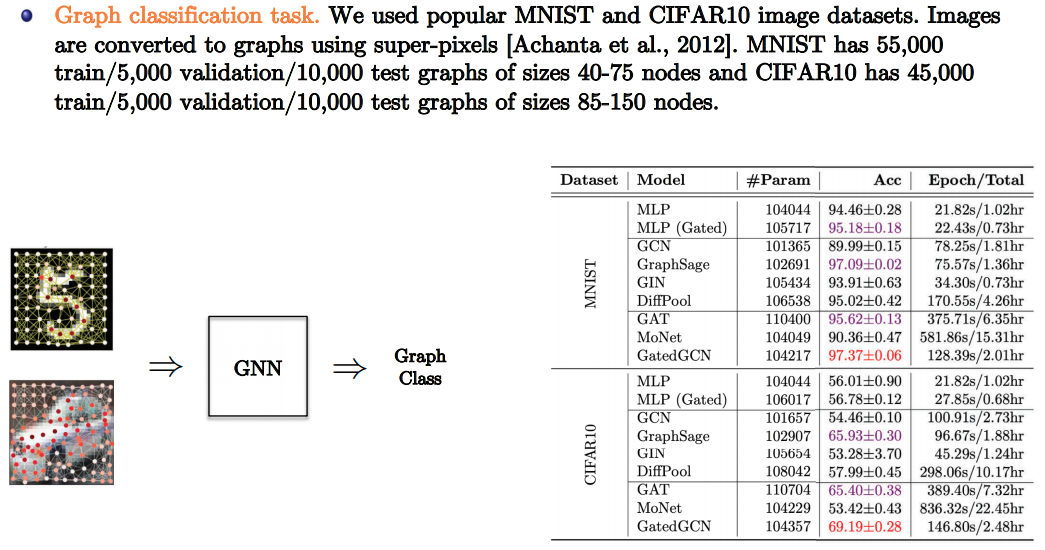
- Slide Credit: Xavier Bresson
Combinatorial Optimization
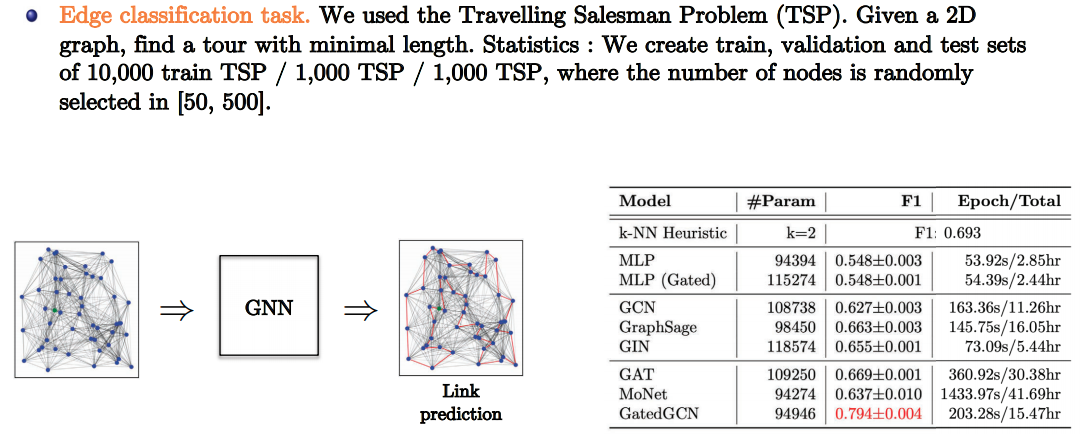
- Slide Credit: Xavier Bresson
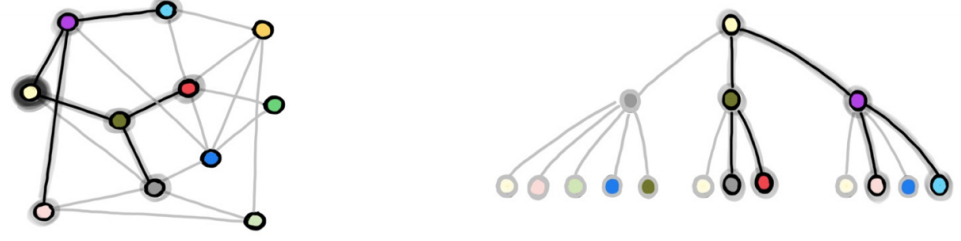
Graph Classification




- Duvenaud et.al "Convolutional Networks on Graphs for Learning Molecular Fingerprints", NeurIPS 2015
Semi-Supervised Classification on Graphs
- Setting:
- Some nodes are labeled
- All other nodes are unlabeled
- Task:
- Predict node label of unlabeled nodes
- Evaluate loss on labeled nodes only: $$ \begin{equation} \mathcal{L} = -\sum_{l\in\mathcal{Y}_L}\sum_{f=1}^F Y_lf \log Z_lf \end{equation} $$
- $\mathcal{Y}_L$: set of labled node indices
- $\mathbf{Y}$: label matrix
- $\mathbf{Z}$: GCN output (after softmax)
Normalization and Depth
- What kind of normalization can we do for graphs?
- Node normalization
- Pair normalization
- Edge normalization
- Does depth matter for GCNs?

Scalable Inception Graph Neural Networks
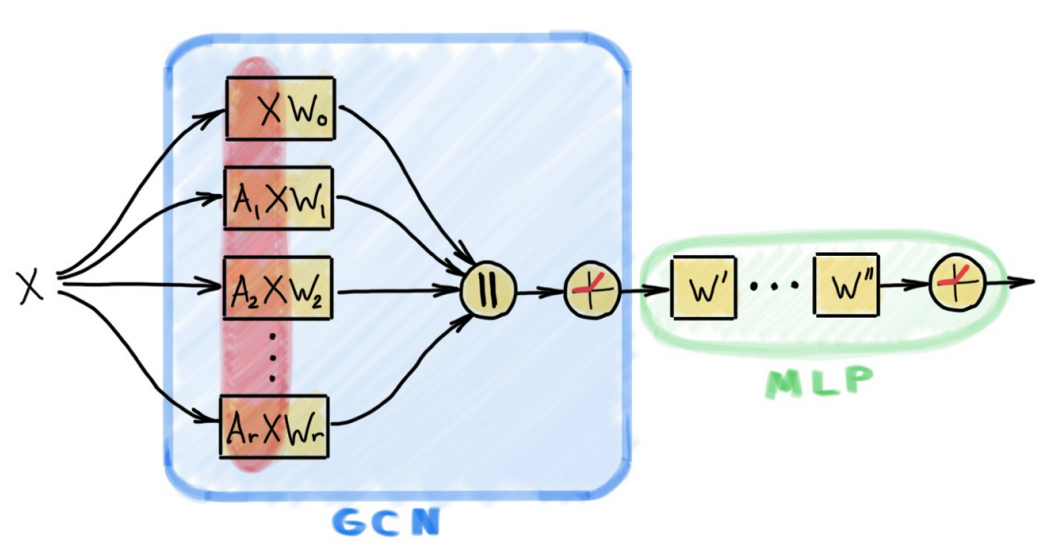
- Figure Credit: Michael Bronstein
Scalable Inception Graph Neural Networks


Graph CNN Challenges
- How to define compositionality on graphs (i.e. convolution, downsampling, and pooling on graphs)?
- How to ensure generalizability across graphs?
- And how to make them numerically fast? (as standard CNNs)
- Scalability: millions of node, billions of edges
- How to process dynamic graphs?
- How to incorporate higher-order structures?
- How powerful are graph neural networks?
- limited theoretical understanding
- message passing based GCN are no stronger than Weisfeiler-Lehman tests.
Getting Started
- Lots of open questions and uncharted territory.
- Standardized Benchmarks: Open Graph Benchmark
- Software Packages: Pytorch Geometric or Deep Graph Library
Summary
- Generalization of ConvNets to data on graphs
- Re-design convolution operator on graphs
- Linear complexity for sparse graphs
- GPU implementations exist, but not yet optimized for sparse matrix-matrix multiplications.
- Spatial GCN is usually more efficient but less principled.
- Spectral GCN is more principled but usually slow. Computing Laplacian eigenvectors for large scale data is painful.