Deep Reinforcement Learning - I
CSE 891: Deep Learning
Monday December 02, 2020
Overview
- Most of this course was about supervised and unsupervised learning.
- We will look at another machine learning topic, Reinforcement Learning.
- Conceptually, somewhere in between supervised and unsupervised learning.
- An agent acts in an environment and receives a reward signal.
- Today: policy gradient (directly do SGD over a stochastic policy using trial-and-error)
Reinforcement Learning

- An agent interacts with an environment.
- In each time step $t$,
- the agent receives observations which give it information about the state $\mathbf{s}_t$ (e.g. positions of the ball and paddle)
- the agent picks an action $\mathbf{a}_t$ which affects the state
- The agent periodically receives a reward $r(\mathbf{s}_t, \mathbf{a}_t)$, which depends on the state and action
- The agent wants to learn a policy $\pi_{\mathbf{\theta}}(\mathbf{a}_t | \mathbf{s}_t)$
- Distribution over actions depending on the current state and parameters $\mathbf{\theta}$
Markov Decision Processes
- The environment is represented as a Markov Decision Process $\mathcal{M}$.
- Markov assumption: all relevant information is encapsulated in the current state; i.e. the policy, reward, and transitions are all independent of past states given the current state
- Components of an MDP:
- initial state distribution $p(\mathbf{s}_0)$
- policy $\pi_{\mathbf{\theta}}(\mathbf{a}_t|\mathbf{s}_t)$
- transition distribution $p(\mathbf{s}_{t+1}|\mathbf{s}_t, \mathbf{a}_t)$
- reward function $r(\mathbf{s}_t, \mathbf{a}_t)$

Markov Decision Processes
- Goal: Find the optimal policy $\pi^*$ that maximizes (discounted) sum of rewards.
- Problem: Lots of randomness in terms of initial state, transition probabilities and rewards.
- Assume a fully observable environment, i.e. $\mathbf{s}_t$ can be observed directly
- Rollout, or trajectory $\tau = (\mathbf{s}_0, \mathbf{a}_0, \mathbf{s}_1, \mathbf{a}_1, \dots, \mathbf{s}_T, \mathbf{a}_T )$
- Probability of rollout: \begin{equation} \begin{aligned} p(\tau) = p(\mathbf{s}_0)\pi_{\mathbf{\theta}}(\mathbf{a}_0|\mathbf{s}_0)p(\mathbf{s}_1|\mathbf{s}_0, \mathbf{a}_0)\pi_{\mathbf{\theta}}(\mathbf{a}_1|\mathbf{s}_1) \cdots p(\mathbf{s}_T|\mathbf{s}_{T-1},\mathbf{a}_{T-1})\pi_{\mathbf{\theta}}(\mathbf{a}_T|\mathbf{s}_T) \nonumber \end{aligned} \end{equation}
Markov Decision Processes
- Continuous control tasks, e.g., teaching a simulated ant to walk.
- State: positions, angles, and velocities of the joints
- Action: apply forces to the joints
- Reward: distance from starting point
- Policy: output of an ordinary MLP, using the state as input
Markov Decision Processes
- Return for a rollout: $r(\tau) = \sum_{t=0}^T r(\mathbf{s}_t, \mathbf{a}_t)$
- Here we consider a finite horizon $T$; we will look at infinite horizon case later.
- Goal: maximize the expected return, $R = \mathbb{E}_{p(\tau)}[r(\tau)]$
- The expectation is over both the dynamics of the environment as well as the policy, but we can only control the policy.
- The stochastic policy is important, since it makes $R$ a continuous function of the policy parameters.
- Reward functions and dynamics are often discontinuous (e.g. collisions)
Markov Decision Processes


REINFORCE
- REINFORCE is an elegant algorithm for maximizing the expected return $R=\mathbb{E}_{p(\tau)}[r(\tau)]$
- Intuition: trial and error
- Sample a rollout $\tau$. If you get a high reward, try to make it more likely. If you get a low reward, try to make it less likely.
- Interestingly, this can be seen as stochastic gradient ascent on R.
REINFORCE
- Gradient of the expected return: \begin{equation} \begin{aligned} \frac{\partial}{\partial \mathbf{\theta}} \mathbb{E}_{p(\tau)}[r(\tau)] &= \frac{\partial}{\partial \mathbf{\theta}} \sum_{\tau} r(\tau)p(\tau) \\ &= \sum_{\tau} r(\tau)\frac{\partial}{\partial \mathbf{\theta}} p(\tau) \\ &= \sum_{\tau} r(\tau)p(\tau) \frac{\partial}{\partial \mathbf{\theta}} \log p(\tau) \\ &= \mathbb{E}_{p(\tau)}\left[r(\tau)\frac{\partial}{\partial \mathbf{\theta}}\log p(\tau)\right] \end{aligned} \end{equation}
- Derivative formula for $\log$: \begin{equation} \frac{\partial}{\partial \mathbf{\theta}}\log p(\tau) = \frac{\frac{\partial}{\partial \mathbf{\theta}}p(\tau)}{p(\tau)} \Rightarrow \frac{\partial}{\partial \mathbf{\theta}}p(\tau) = p(\tau)\frac{\partial}{\partial \mathbf{\theta}}\log p(\tau) \nonumber \end{equation}
- Compute stochastic estimates of this expectation by sampling rollouts.
REINFORCE
- If you get a large reward, make the rollout more likely. If you get a small reward, make it less likely.
- REINFORCE gradient: \begin{equation} \begin{aligned} \frac{\partial}{\partial \mathbf{\theta}} \log p(\tau) &= \frac{\partial}{\partial \mathbf{\theta}}\log \left[p(\mathbf{s}_0)\prod_{t=1}^T\pi_{\mathbf{\theta}}(\mathbf{a}_t|\mathbf{s}_t)\prod_{t=1}^Tp(\mathbf{s}_t|\mathbf{s}_{t-1},\mathbf{a}_{t-1})\right] \\ &= \frac{\partial}{\partial \mathbf{\theta}} \log\prod_{t=1}^T \pi_{\mathbf{\theta}}(\mathbf{a}_t|\mathbf{s}_t) \\ &= \log\prod_{t=1}^T \frac{\partial}{\partial \mathbf{\theta}}\pi_{\mathbf{\theta}}(\mathbf{a}_t|\mathbf{s}_t) \end{aligned} \end{equation}
- REINFORCE tries to make all the actions more likely or less likely, depending on the reward, i.e., it does not do credit assignment.
REINFORCE
- Repeat Forever:
- Sample a rollout $\tau=(\mathbf{s}_0,\mathbf{a}_0,\mathbf{s}_1,\mathbf{a}_1,\dots,\mathbf{s}_T,\mathbf{a}_T)$
- $r(\tau) \leftarrow \sum_{t=0}^T r(\mathbf{s}_t, \mathbf{a}_t)$
- for $k = 0,\dots,T$ do
- $\quad \mathbf{\theta} \leftarrow \mathbf{\theta} + \alpha r(\tau)\frac{\partial}{\partial \mathbf{\theta}}\log \pi_{\mathbf{\theta}}(\mathbf{a}_k|\mathbf{s}_k)$
- end for
- Observation: Actions should only be reinforced based on future rewards. Actions cannot influence past rewards.
REINFORCE
- Repeat Forever:
- Sample a rollout $\tau=(\mathbf{s}_0,\mathbf{a}_0,\mathbf{s}_1,\mathbf{a}_1,\dots,\mathbf{s}_T,\mathbf{a}_T)$
- for $k = 0,\dots,T$ do
- $\quad r(\tau)_t \leftarrow \sum_{k=t}^T r(\mathbf{s}_t, \mathbf{a}_t)$
- $\mathbf{\theta} \leftarrow \mathbf{\theta} + \alpha r(\tau)_t\frac{\partial}{\partial \mathbf{\theta}}\log \pi_{\mathbf{\theta}}(\mathbf{a}_k|\mathbf{s}_k)$
- end for
- You can show that this still gives unbiased gradient estimates.
Optimizing Discontinuous Objectives
- Edge case of RL: handwritten digit classification, but maximizing accuracy (or minimizing 0–1 loss)
- Gradient descent completely fails if the cost function is discontinuous:
- Supervised learning solution: use a surrogate loss function, e.g. logistic-cross-entropy
- RL formulation: in each episode, the agent is shown an image, guesses a digit class, and receives a reward of 1 if it is correct or 0 if it is wrong.
- In practice, we would never actually do it this way, but it gives us an interesting comparison with backprop.

Optimizing Discontinuous Objectives
- RL Formulation:
- one step at a time
- state $\mathbf{x}$: an image
- action $\mathbf{a}$: a digit class
- reward $r(\mathbf{s},\mathbf{a})$: 1 if correct and 0 if wrong
- policy $\pi_{\mathbf{\theta}}(\mathbf{a}|\mathbf{s})$: a distribution over classes
- policy network: can be implemented through a MLP with softmax outputs
Optimizing Discontinuous Objectives
- Let $t$ the integer target, $\mathbf{t}_k$ the target one-hot representation, $\mathbf{z}_k$ denote the logits, and $\mathbf{y}_k$ denote the softmax output.
- To use REINFORCE, we sample $\mathbf{a} \sim \pi_{\mathbf{\theta}}(\cdot | \mathbf{x})$ and apply: \begin{equation} \begin{aligned} \mathbf{\theta} &\leftarrow \mathbf{\theta} + \alpha r(\mathbf{a},\mathbf{t})\frac{\partial}{\partial \mathbf{\theta}}\log \pi_{\theta}(\mathbf{a}|\mathbf{x}) \\ &= \mathbf{\theta} + \alpha r(\mathbf{a},\mathbf{t})\frac{\partial}{\partial \mathbf{\theta}} \log y_{a} \\ &= \mathbf{\theta} + \alpha r(\mathbf{a},\mathbf{t})\sum_{k=1}(a_k - y_k)\frac{\partial}{\partial \mathbf{\theta}} z_k \end{aligned} \end{equation}
- Logistic regression SGD update: \begin{equation} \begin{aligned} \mathbf{\theta} &\leftarrow \mathbf{\theta} + \alpha \frac{\partial}{\partial \mathbf{\theta}} \log y_t\\ &= \mathbf{\theta} + \alpha \sum_{k=1}(t_k-y_k)\frac{\partial}{\partial \mathbf{\theta}} z_k \end{aligned} \end{equation}
Reward Functions
- Update rule: \[\mathbf{\theta} \leftarrow \mathbf{\theta} + \alpha r(\mathbf{a},\mathbf{t})\frac{\partial}{\partial \mathbf{\theta}}\log \pi_{\theta}(\mathbf{a}|\mathbf{x})\]
- A constant offset can be added to the reward to obtain an equivalent optimization problem.
- Behavior if $r = 0$ for wrong answers and $r = 1$ for correct answers
- wrong: do nothing, correct: make the action more likely
- If $r = 10$ for wrong answers and $r = 11$ for correct answers
- wrong: make the action more likely, correct: make the action even more likely
- If $r = -10$ for wrong answers and $r = -9$ for correct answers
- wrong: make the action less likely, correct: make the action less likely, but not as much
Reward Functions
- Problem: REINFORCE update depends on arbitrary constant factors added to the reward.
- Observation: we can subtract a baseline $b$ from the reward without biasing the gradient. \begin{equation} \begin{aligned} \mathbb{E}_{p(\tau)}\left[(r(\tau)-b)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] &= \mathbb{E}_{p(\tau)}\left[r(\tau)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] - b\mathbb{E}_{p(\tau)}\left[\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] \\ &= \mathbb{E}_{p(\tau)}\left[r(\tau)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] - b\sum_{\tau}p(\tau)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau) \\ &= \mathbb{E}_{p(\tau)}\left[r(\tau)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] - b\sum_{\tau}\frac{\partial}{\partial\mathbf{\theta}}p(\tau) \\ &= \mathbb{E}_{p(\tau)}\left[r(\tau)\frac{\partial}{\partial\mathbf{\theta}}\log p(\tau)\right] - 0 \end{aligned} \end{equation}
- Pick a baseline $b$ such that good rewards are positive and bad ones are negative.
- $\mathbb{E}[r(\tau)]$ is a good choice of baseline, but cannot always be computed easily. Lots of research on trying to approximate it.
Getting Policy Gradient to Work
- Evaluate each action using only future rewards, since it has no influence on past rewards. It can be shown this gives unbiased gradients.
- Natural policy gradient corrects for the geometry of the space of policies, preventing the policy from changing too quickly.
- Rather than use the actual return, evaluate actions based on estimates of future returns. This is a class of methods known as actor-critic.
- Trust region policy optimization (TRPO) and proximal policy optimization (PPO) are modern policy gradient algorithms which are very effective for continuous control problems.
Backpropagation vs REINFORCE
- Backpropagation: Does credit assignment – it tells you exactly which activations and parameters should be adjusted upwards or downwards to decrease the loss on some training example.
- REINFORCE: Does not do credit assignment. If a rollout happens to be good, all the actions get reinforced, even if some of them were bad.
- Reinforcing all the actions as a group leads to random walk behavior.
Why Policy Gradients
- Can handle discontinuous cost functions.
- Does not need an explicit model of the environment, i.e. environment rewards and dynamics are treated as black boxes.
- Policy gradient is an example of model-free reinforcement learning, since the agent doesn’t try to fit a model of the environment.
- Almost everyone thinks model-based approaches are needed for AI, but nobody has a clue how to get it to work.
Evolution Strategies
- REINFORCE can handle discontinuous dynamics and reward functions, but needs a differentiable network since it computes $\frac{\partial}{\partial \mathbf{\theta}}\log \pi_{\theta}(\mathbf{a}_t|\mathbf{s}_t)$.
- Evolution strategies (ES) take the policy gradient idea a step further, and avoid backprop entirely.
- ES can use deterministic policies. It randomizes over the choice of policy rather than over the choice of actions.
- sample a random policy from a distribution $p_{\eta}(\mathbf{\theta})$ parameterized by $\eta$ and apply the policy gradient trick \begin{equation} \frac{\partial}{\partial \eta}\mathbb{E}_{\mathbf{\theta}\sim p{\eta}}[r(\tau(\mathbf{\theta}))] = \mathbb{E}_{\mathbf{\theta}\sim p{\eta}}\left[r(\tau(\mathbf{\theta}))\frac{\partial}{\partial \eta}\log p_{\eta}(\mathbf{\theta})\right] \nonumber \end{equation}
- The policy network itself can be discontinuous.
Evolution Strategies

- Salimans et. al. Evolution Strategies as a Scalable Alternative to Reinforcement Learning, arXiv:1703.03864
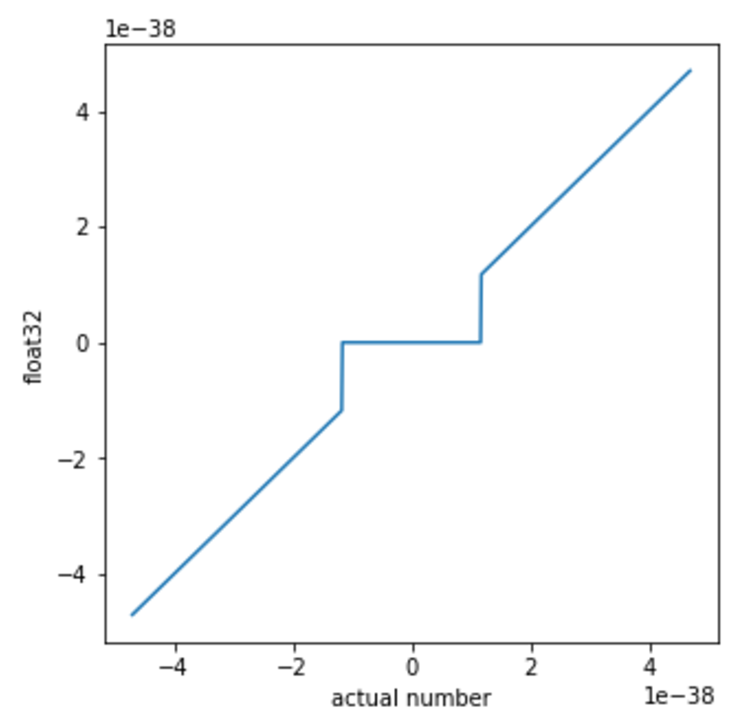
Evolution Strategies: IEEE Floating Point
- The IEEE floating point standard is nonlinear, since small enough numbers get truncated to zero.
- This acts as a discontinuous activation function, which ES is able to handle.
- ES was able to train a good MNIST classifier using a "linear" activation function.