Normalizing Flows
CSE 891: Deep Learning
Monday November 17, 2021
A Probabilistic Viewpoint
- Goal: modeling $p_{data}$




Overview
- How to fit a density model $p_{\theta}(\mathbf{x})$ with continuous $\mathbf{x}\in\mathbb{R}^n$
- What do we want from this model?
- Good fit to the training data (really, the underlying distribution!)
- For new $\mathbf{x}$, ability to evaluate $p_{\theta}(\mathbf{x})$
- Ability to sample from $p_{\theta}(\mathbf{x})$
- And, ideally, a latent representation that is meaningful
Recap: Probability Density Models

Recap: How to fit a density model?
- Maximum Likelihood: \begin{equation}\max_{\theta}\sum_i \log p_{\theta}\left(x^{(i)}\right)\end{equation}
- Equivalently: \begin{equation}\min_{\theta}\mathbb{E}_{x} [-\log p_{\theta}(x)]\end{equation}
Example: Mixture of Gaussians
\begin{equation}
p_{\theta}(x) = \sum_{i=1}^k \pi_i\mathcal{N}(x_i;\mu_i,\sigma_i^2)
\end{equation}
- Parameters: means and variances of components, mixture weights $\theta = (\pi_1,\dots,\pi_k,\mu_1,\dots,\mu_k,\sigma_1,\dots,\sigma_k)$

How to fit a general density model?

- How to ensure proper distribution? \begin{equation} \int_{\infty}^{\infty} p(x)dx = 1 \quad p_{\theta}(x) \geq 0 \forall x \end{equation}
- How to sample?
- Latent representation?
Flows: Main Idea

- Generally: $\mathbf{z} \sim p_{Z}(\mathbf{z})$
- Normalizing Flow: $\mathbf{z} \sim \mathcal{N}(0,1)$
- Key questions:
- How to train?
- How to evaluate $p_{\theta}(x)$?
- How to sample?
Flows: Training
\begin{equation}\max_{\theta}\sum_i \log p_{\theta}\left(x^{(i)}\right)\end{equation}
- Need $f(\cdot)$ to be invertible and differentiable
Change of Variables Formula
- Let $f^{-1}$ denote a differentiable, bijective mapping from space $\mathcal{Z}$ to space $\mathcal{X}$, i.e., it must be 1-to-1 and cover all of $\mathcal{X}$.
- Since $f^{-1}$ defines a one-to-one correspondence between values $\mathbf{z} \in \mathcal{Z}$ and $\mathbf{x} \in \mathcal{X}$, we can think of it as a change-of-variables transformation.
- Change-of-Variables Formula from probability theory. If $\mathbf{z} = f(\mathbf{x})$, then \begin{equation} p_{X}(\mathbf{x}) = p_Z(\mathbf{z})\left|det\left(\frac{\partial \mathbf{z}}{\partial \mathbf{x}}\right)\right| \nonumber \end{equation}
- Intuition for the Jacobian term:

Flows: Training
\begin{equation}\max_{\theta}\sum_i \log p_{\theta}\left(x^{(i)}\right)\end{equation}
\begin{equation}
\begin{aligned}
\mathbf{z} &= f_{\theta}(\mathbf{x}) \\
p_{\theta}(\mathbf{x}) &= p_Z(\mathbf{z})\left|det\left(\frac{\partial \mathbf{z}}{\partial \mathbf{x}}\right)\right| \\
&= p_Z(f_{\theta}(\mathbf{x}))\left|det\left(\frac{\partial f_{\theta}(\mathbf{x})}{\partial \mathbf{x}}\right)\right| \\
\end{aligned}
\end{equation}
\begin{equation}\max_{\theta}\sum_i \log p_{\theta}\left(x^{(i)}\right) = \max_{\theta}\sum_i \log p_Z(f_{\theta}(\mathbf{x}^{(i)})) + \log\left|det\left(\frac{\partial f_{\theta}(\mathbf{x})}{\partial \mathbf{x}}\right)\right|\end{equation}
- Assuming we have an expression for $p_Z$, we can optimize this with Stochastic Gradient Descent
Flows: Sampling
- Step 1: sample $\mathbf{z} \sim p_Z(\mathbf{z})$
- Step 2: $\mathbf{x} = f^{-1}_{\theta}(\mathbf{z})$
Change of Variables Formula
- Problems?
- The mapping $f$ needs to be invertible, with an easy-to-compute inverse.
- It needs to be differentiable, so that the Jacobian $\frac{\partial \mathbf{x}}{\partial \mathbf{z}}$ is defined.
- We need to be able to compute the (log) determinant.
Example: Flow to Uniform $\mathbf{z}$
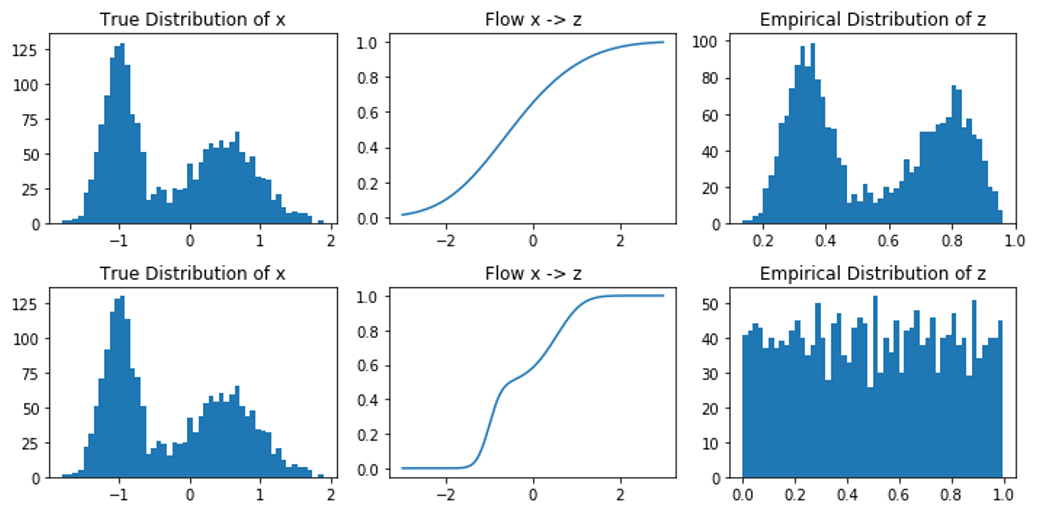
Example: Flow to Beta(5,5) $\mathbf{z}$

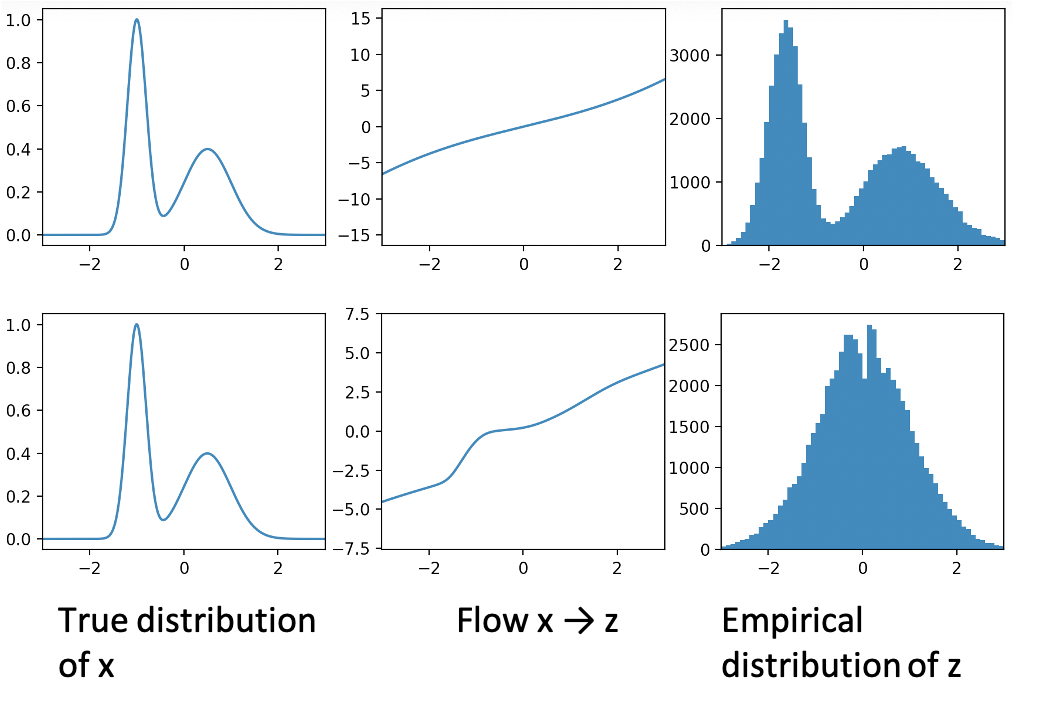
Example: Flow to Gaussian $\mathbf{z}$
2-D Autoregressive Flow
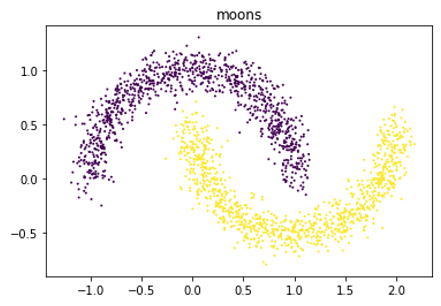
\begin{equation} \begin{aligned} x_1 &= z_1 = f_{\theta}(x_1) \\ x_2 &= z_2 = f_{\theta}(x_1,x_2) \\ \end{aligned} \end{equation}2-D Autoregressive Flow: Two Moons
- Architecture:
- Base distribution: $Uniform[0,1]^2$
- $x_1$: mixture of 5 Gaussians
- $x_2$: mixture of 5 Gaussians, conditioned on $x_1$

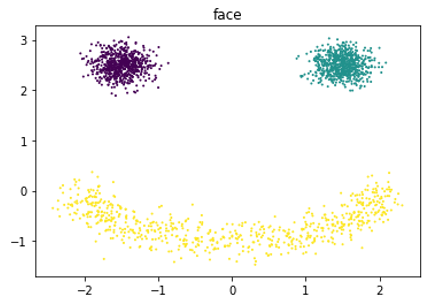
2-D Autoregressive Flow: Face
- Architecture:
- Base distribution: $Uniform[0,1]^2$
- $x_1$: mixture of 5 Gaussians
- $x_2$: mixture of 5 Gaussians, conditioned on $x_1$

High-Dimensional Data

Constructing Flows: Composition
- Flows can be composed \begin{equation} \begin{aligned} \mathbf{x} &\rightarrow f_1 \rightarrow f_2 \cdots \rightarrow f_k \rightarrow \mathbf{z} \\ \mathbf{z} &= f_k \circ \cdots \circ f_1(\mathbf{x}) \\ \mathbf{x} &= f_1^{-1} \circ \cdots \circ f_k^{-1}(\mathbf{z}) \\ \log p_{\theta}(\mathbf{x}) &= \log p_{\theta}(\mathbf{z}) + \sum_{i=1}^k\log \left|det\frac{\partial f_i}{\partial f_{i-1}}\right| \end{aligned} \end{equation}
- Easy way to increase expressiveness
Affine Flows
- Another name for affine flow: multivariate Gaussian.
- Parameters: an invertible matrix $\mathbf{A}$ and a vector $\mathbf{b}$
- $f(\mathbf{x}) = \mathbf{A}^{-1}(\mathbf{x}-\mathbf{b})$
- Sampling: $\mathbf{x} = \mathbf{Az} + \mathbf{b}$, where $\mathbf{z} ~ \mathcal{N}(\mathbf{0}, \mathbf{I})$
- Log likelihood is expensive when dimension is large.
- The Jacobian of $f$ is $\mathbf{A}^{-1}$
- Log likelihood involves calculating $det(\mathbf{A})$
Elementwise Flows
\begin{equation} f_{\theta}(x_1,x_2,\dots,x_n) = (f_{\theta}(x_1),\dots,f_{\theta}(x_1)) \end{equation}- Lots of freedom in elementwise flow
- Can use elementwise affine functions or CDF flows.
- The Jacobian is diagonal, so the determinant is easy to evaluate. \begin{equation} \begin{aligned} \frac{\partial \mathbf{z}}{\partial \mathbf{x}} &= diag(f'_{\theta}(x_1), \dots, f'_{\theta}(x_d)) \\ det\left(\frac{\partial \mathbf{z}}{\partial \mathbf{x}}\right) &= \prod_{i=1}^d f'_{\theta}(x_i) \end{aligned} \end{equation}
Flows with Neural Networks?
- Requirement: Invertible and Differentiable
- Neural Network
- If each layer is a flow, then sequencing of layers is also flow
- Each layer: ReLU, Sigmoid, Tanh?
Reversible Blocks
- Now let us define a reversible block which is invertible and has a tractable determinant.
- Such blocks can be composed.
- Inversion: $f^{-1} = f_1^{-1} \circ \dots \circ f_k^{-1}$
- Determinants: $\left|\frac{\partial \mathbf{x}_k}{\partial \mathbf{z}}\right| = \left|\frac{\partial \mathbf{x}_k}{\partial \mathbf{x}_{k-1}}\right| \dots \left|\frac{\partial \mathbf{x}_2}{\partial \mathbf{x}_1}\right|\left|\frac{\partial \mathbf{x}_1}{\partial \mathbf{z}}\right|$

Reversible Blocks
- Recall the residual blocks: \begin{equation} \mathbf{y} = \mathbf{x} + \mathcal{F}(\mathbf{x}) \nonumber \end{equation}
- Reversible blocks are a variant of residual blocks. Divide the units into two groups, $\mathbf{x}_1$ and $\mathbf{x}_2$. \begin{eqnarray} \mathbf{y}_1 &=& \mathbf{x}_1 + \mathcal{F}(\mathbf{x}_2) \nonumber \\ \mathbf{y}_2 &=& \mathbf{x}_2 \nonumber \end{eqnarray}
- Inverting the reversible block: \begin{eqnarray} \mathbf{x}_2 &=& \mathbf{y}_2 \nonumber \\ \mathbf{x}_1 &=& \mathbf{y}_1 - \mathcal{F}(\mathbf{x}_2) \nonumber \end{eqnarray}


Reversible Blocks
- Composition of two reversible blocks, but with $\mathbf{x}_1$ and $\mathbf{x}_2$ swapped:
- Forward: \begin{eqnarray} \mathbf{y}_1 &=& \mathbf{x}_1 + \mathcal{F}(\mathbf{x}_2) \nonumber\\ \mathbf{y}_2 &=& \mathbf{x}_2 + \mathcal{G}(\mathbf{y}_1) \nonumber \end{eqnarray}
- Backward: \begin{eqnarray} \mathbf{x}_2 &=& \mathbf{y}_2 - \mathcal{G}(\mathbf{y}_1) \nonumber\\ \mathbf{x}_1 &=& \mathbf{y}_1 - \mathcal{F}(\mathbf{x}_2) \nonumber \end{eqnarray}

Volume Preservation
- We still need to compute the log determinant of the Jacobian.
- The Jacobian of the reversible block: \begin{eqnarray} \mathbf{y}_1 &=& \mathbf{x}_1 + \mathcal{F}(\mathbf{x}_2) \nonumber \\ \mathbf{y}_2 &=& \mathbf{x}_2 \nonumber \\ \frac{\partial \mathbf{y}}{\partial \mathbf{x}} &=& \begin{bmatrix} \mathbf{I} & \frac{\partial \mathcal{F}}{\partial \mathbf{x}_2} \\ \mathbf{0} & \mathbf{I} \end{bmatrix} \nonumber \end{eqnarray}

- This is an upper triangular matrix. The determinant of an upper triangular matrix is the product of the diagonal entries, or in this case, 1.
- Since the determinant is 1, the mapping is said to be volume preserving.
Nonlinear Independent Components Estimation
- We just defined the reversible block.
- Easy to invert by subtracting rather than adding the residual function.
- The determinant of the Jacobian is 1.
- Nonlinear Independent Components Estimation (NICE) trains a generator network which is a composition of lots of reversible blocks.
- We can compute the likelihood function using the change-of-variables formula: \begin{equation} p_X(\mathbf{x}) = p_Z(\mathbf{z})\left|det\left(\frac{\partial \mathbf{x}}{\partial \mathbf{z}}\right)\right|^{-1} = p_Z(\mathbf{z}) \nonumber \end{equation}
- We can train this model using maximum likelihood, i.e., given a dataset $\{\mathbf{x}^{(1)}, \dots, \mathbf{x}^{(N)}\}$, we maximize the likelihood: \begin{equation} \prod_{i=1}^N p_X(\mathbf{x}^{(i)}) = \prod_{i=1}^N p_Z(f^{-1}(\mathbf{x}^{(i)})) \nonumber \end{equation}
Nonlinear Independent Components Estimation
- Likelihood: \begin{equation} p_X(\mathbf{x}) = p_Z(\mathbf{z}) = p_z(f(\mathbf{x})) \nonumber \end{equation}
- Remember, $p_Z$ is a simple, fixed distribution (e.g. independent Gaussians)
- Intuition: train the network such that $f(\cdot)$ maps each data point to a high-density region of the code vector space $\mathcal{Z}$.
- Without constraints on $f(\cdot)$, it could map everything to 0, and this likelihood objective would make no sense.
- But it cannot do this because it is volume preserving.
Nonlinear Independent Components Estimation

RealNVP
- Reversible Model:
- Forward Function: \begin{eqnarray} \mathbf{y}_1 &=& \mathbf{x}_1 \nonumber \\ \mathbf{y}_2 &=& \mathbf{x}_2 \odot \exp\left(\mathcal{F}_1(\mathbf{x}_1)\right) + \mathcal{F}_2(\mathbf{x}_1) \nonumber \end{eqnarray}
- Inverse Function: \begin{eqnarray} \mathbf{x}_1 &=& \mathbf{y}_1 \nonumber \\ \mathbf{x}_2 &=& \left(\mathbf{y}_2 - \mathcal{F}_2(\mathbf{x}_1)\right) \odot \exp\left(-\mathcal{F}_1(\mathbf{x}_1)\right) \nonumber \end{eqnarray}
- Jacobian: \begin{equation}\begin{bmatrix} \mathbf{I} & \mathbf{0} \\ \frac{\partial \mathbf{y}_2}{\partial \mathbf{x}_1} & diag(\exp(\mathcal{F}_1(\mathbf{x}_1)) \\ \end{bmatrix}\end{equation}
How to Partition Variables?

Good vs Bad Partitioning
- checkerboard; channel squeeze; channel processing; channel unsqueeze; checkerboard

- Mask top half; mask bottom half; mask left half; mask right half

Nonlinear Independent Components Estimation
- Samples produced by RealNVP, a model based on NICE.

Other Classes of Flows
- Glow
- Invertible $1\times 1$ convolutions
- Large-scale training
- Continuous time flows (FFJORD)
- Allows for unrestricted architectures. Invertibility and fast log probability computation guaranteed.

Summary
- The ultimate goal: a likelihood-based model with
- fast sampling
- fast inference
- fast training
- good samples
- good compression
- Flows seem to let us achieve some of these criteria.
- Open question: How exactly do we design and compose flows for great performance?