Informed Search
CSE 440: Introduction to Artificial Intelligence
Content Credits: CMU AI, http://ai.berkeley.edu
Today
- Informed Search Methods
- Heuristics
- Greedy Search
- $A^*$ Search

- Reading
- Today's Lecture: RN Chapter 3.5-3.7, 4.1-4.2
- Next Lecture: RN Chapter 6
Search Problems
- Methods we saw:
- DFS
- BFS
- UCS
- Searching with your EYES CLOSED
- Methods we will see:
- Greedy
- $A^*$
- Searching with your EYES OPEN
Example: Pancake Problem

Heuristics
Search Heuristics
- A heuristic is:
- A function that estimates how close a state is to a goal
- Designed for a particular search problem
- Examples: Manhattan distance, Euclidean distance

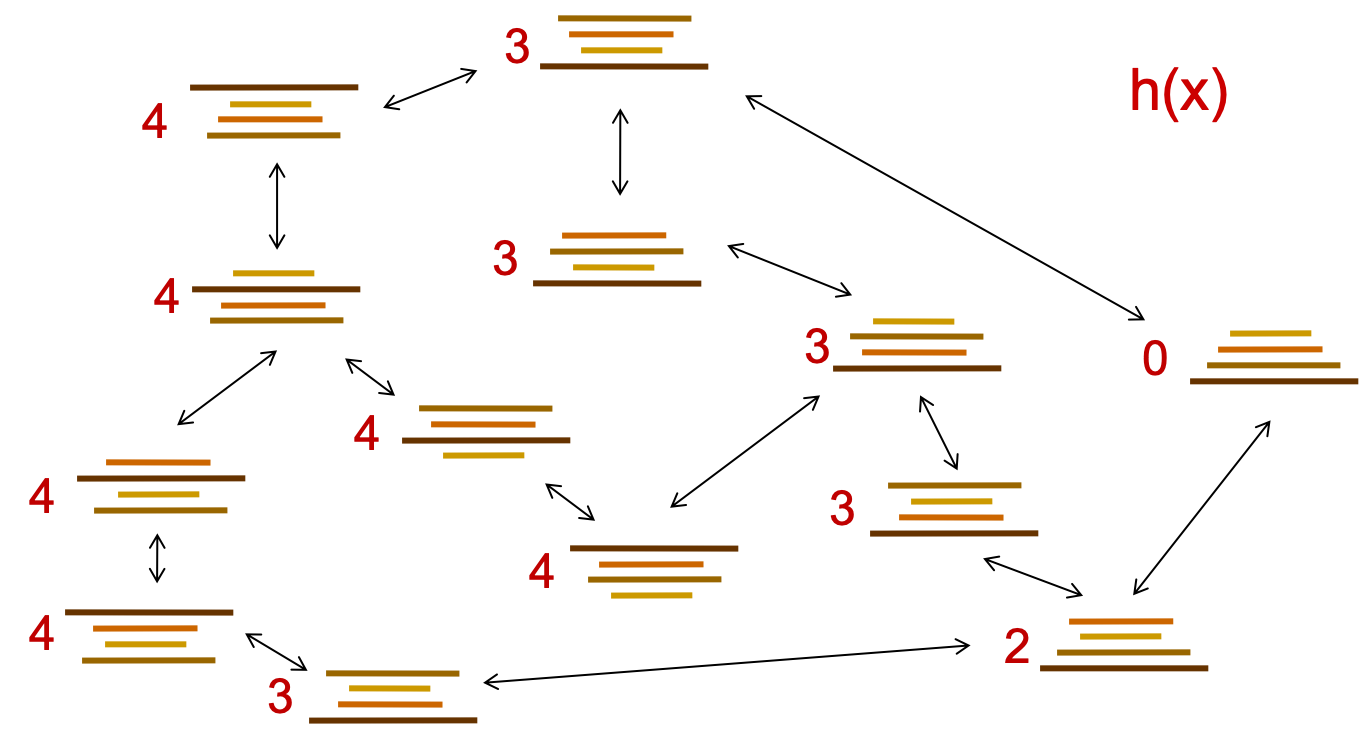
Example: Heuristic Function

Example: Heuristic Function
- Eg: index of the largest pancake that is still out of place
Greedy Search
Example: Heuristic Function
Greedy Search: Romania
- Expand the node that seems closest...
- What can go wrong?





Greedy Search
- Strategy: expand a node that you think is closest to a goal state
- Heuristic: distance estimate to nearest goal for each state
- A common case:
- Best-first takes you straight to the (wrong) goal
- Worst-case: like a badly-guided DFS
Greedy Demo
$A^*$ Search
Key Idea: Combine UCS and Greedy
Combining UCS and Greedy
- Uniform-cost orders by path cost, or backward cost $g(n)$.
- Greedy orders by goal proximity, or forward cost $h(n)$.
- $A^*$ Search orders by the sum: $f(n) = g(n) + h(n)$





When should $A^*$ terminate?
- Should we stop when we enqueue a goal?
- No: only stop when we dequeue a goal

Is $A^*$ optimal?

- What went wrong?
- Actual bad goal cost $\leq$ estimated good goal cost
- We need estimates to be less than actual costs
Admissibility
- Inadmissible (pessimistic) heuristics break optimality by trapping good plans on the fringe.
- Admissible (optimistic) heuristics slow down bad plans but never outweigh true costs
Admissible Heuristics
- A heuristic $h$ is admissible (optimistic) if: $$0 \leq h(n) \leq h^*(n)$$
- where $h^*(n)$ is the true cost to a nearest goal
- Example:

- In practice, coming up with an admissible heuristic is most of what is involved in using $A^*$.
Optimality of $A^*$ Tree Search
- Assume:
- A is an optimal goal node
- B is a suboptimal goal node
- h is admissible
- Claim:
- A will exit the fringe before B
Optimality of $A^*$ Tree Search
Proof:
- Imagine $B$ is on the fringe
- Some ancestor $n$ of $A$ is on the fringe too
- Claim: $n$ will be expanded before $B$
- $f(n)$ is less or equal to $f(A)$
- $f(A)$ is less than $f(B)$
- $n$ expands before $B$
- All ancestors of $A$ expand before $B$
- A expands before B
- $A^*$ search is optimal
-
$$
\begin{eqnarray}
f(n) &=& g(n) + h(n) \nonumber \\
f(n) &\leq& g(A) \mbox{ admissibility of } h \nonumber \\
g(A) &=& f(A) \mbox{ } h=0 \mbox{ at goal} \nonumber
\end{eqnarray}
$$
$$
\begin{eqnarray}
g(A) &\leq& g(B) \mbox{ } B \mbox{ is suboptimal} \nonumber \\
f(A) &\leq& f(B) \mbox{ } h=0 \mbox{ at goal} \nonumber
\end{eqnarray}
$$
$$
\begin{eqnarray}
f(n) \leq f(A) < f(B) \nonumber
\end{eqnarray}
$$
UCS vs $A^*$ Contours
- Uniform-cost expands equally in all "directions"
- $A^*$ expands mainly toward the goal, but does hedge its bets to ensure optimality
$A^*$ Demo
$A^*$ Applications
- Video games
- Pathing / routing problems
- Resource planning problems
- Robot motion planning
- Language analysis
- Machine translation
- Speech recognition
- ...
Creating Admissible Heuristics
- Most of the work in solving hard search problems optimally is in coming up with admissible heuristics
- Often, admissible heuristics are solutions to relaxed problems, where new actions are available
- Inadmissible heuristics can often be useful too.
Example: 8 Puzzle
- What are the states?
- How many states?
- What are the actions?
- How many successors from the start state?
- What should the costs be?
8 Puzzle: Heuristic III
$$
\begin{bmatrix}
7 & 2 & 4 \\
5 & \times & 6 \\
8 & 3 & 1
\end{bmatrix}
$$
$$
\begin{bmatrix}
\times & 1 & 2 \\
3 & 4 & 5 \\
6 & 7 & 8
\end{bmatrix}
$$
- How about using the actual cost as a heuristic?
- Would it be admissible?
- Would we save on nodes expanded?
- What is wrong with it?
- With $A^*$: a trade-off between quality of estimate and work done per node
- As heuristics get closer to the true cost, you will expand fewer nodes but usually do more work per node to compute the heuristic itself
Graph Search
Tree Search: Extra Work !!

Graph Search
- Idea: never expand a state twice
- How to implement:
- Tree search + set of expanded states ("closed set")
- Expand the search tree node-by-node, but...
- Before expanding a node, check to make sure its state has never been expanded before
- If not new, skip it, if new add to closed set
- Important: store the closed set as a set, not a list
- Can graph search wreck completeness? Why or why not?
- How about optimality?
$A^*$ Graph Search Gone Wrong?

Consistency of Heuristics
- Main Idea: estimated heuristic costs $\leq$ actual costs
- Admissibility: heuristic cost $\leq$ actual cost to goal $h(A) \leq$ actual cost from A to G
- Consistency: heuristic "arc" cost $\leq$ actual cost for each arc $h(A) - h(C) \leq$ cost(A to C)
- Consequences of consistency:
- The $f$ value along a path never decreases $h(A) \leq$ cost(A to C) $+$ h(C)
- $A^*$ graph search is optimal
Tree-Search Pseudo-Code

Graph Search Pseudo-Code

$A^*$ Summary
- $A^*$ uses both backward costs and (estimates of) forward costs
- $A^*$ is optimal with admissible heuristics
- Heuristic design is key: often use relaxed problems
Q & A