Constraint Satisfaction - I
CSE 440: Introduction to Artificial Intelligence
Content Credits: CMU AI, http://ai.berkeley.edu
What are Constraint Satisfaction Problems?
- Special kind of search problems.
- $N$ variables
- Values from domain $D$
- assignment satisfies constraints
- States: partial assignment
- Goal Test: satisfies all constraints
- Successor Function: assign an unassigned variable
Today
- Constraint Satisfaction
- Reading
- Today's Lecture: RN Chapter 6
- Next Lecture: RN Chapter 6

What is Search For?
- Given assumptions about the world: a single agent, deterministic actions, fully observed state, discrete state space
- Planning: sequences of actions
- The path to the goal is the important thing
- Paths have various costs, depths
- Heuristics give problem-specific guidance
- Identification: assignments to variables
- The goal itself is important, not the path
- All paths at the same depth (for some formulations)
- CSPs are a specialized class of identification problems
Constraint Satisfaction Problems
What are Constraint Satisfaction Problems?
- Standard search problems:
- State is a "black box": arbitrary data structure
- Goal test can be any function over states
- Successor function can also be anything
- Constraint satisfaction problems (CSPs):
- A special subset of search problems
- State is defined by variables $\mathbf{X}_i$ with values from a domain $D$ (sometimes $D$ depends on $i$)
- Goal test is a set of constraints specifying allowable combinations of values for subsets of variables
- Allows useful general-purpose algorithms with more power than standard search algorithms
CSP Example
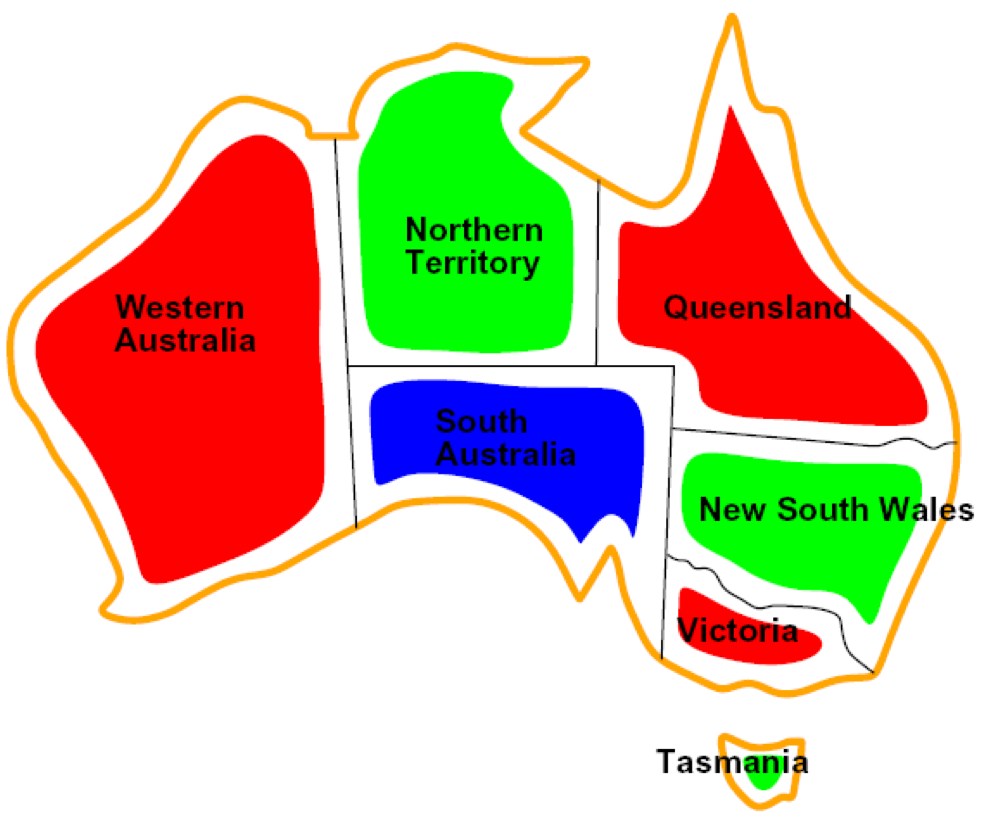
Example: Map Coloring
- Variables: $WA$,$NT$,$Q$,$NSW$,$V$,$SA$,$T$
- Domains: $D=\{red, green, blue\}$
- Constraints: adjacent regions must have different colors
- Implicit: $WA \neq NT$
- Explicit: $(WA,NT) \in {(red, green),(red, blue),\dots}$
- Solutions: Assignments that satisfy all constraints, e.g.:
- {WA=red, NT=green, Q=red, NSW=green, V=red, SA=blue, T=green}
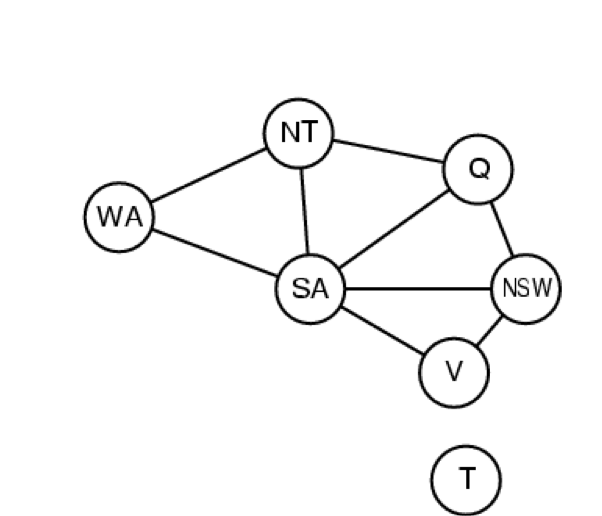
Constraint Graphs
- Binary CSP: each constraint relates two variables
- Constraint Graph: nodes are variables, arcs are constraints
- General-purpose CSP algorithms use the graph structure to speed up search. E.g., Tasmania is an independent subproblem.
Example: N Queens
- Formulation 1:
- Variables: $X_{ij}$
- Domains: $\{0,1\}$
- Constraints:
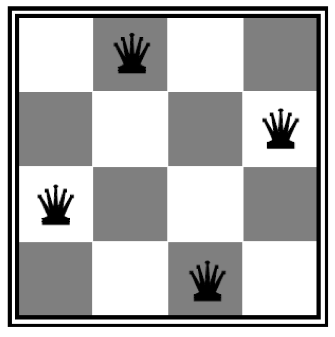
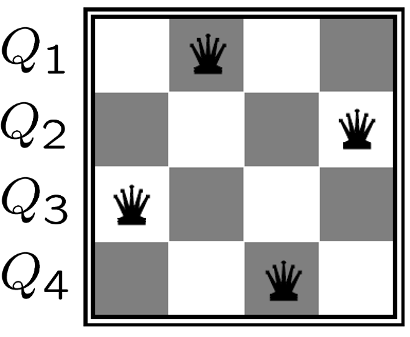
Example: N Queens
- Formulation 2:
- Variables: $Q_k$
- Domains: ${1,2,3,\dots,N}$
- Constraints:
- Implicit: $\forall(i,j) \mbox{ non-threatening } (Q_i, Q_j)$
- Explicit: $(Q_1, Q_2) \in \{(1,3),(1,4),\dots\}$
Example: The Waltz Algorithm

Example: The Waltz Algorithm
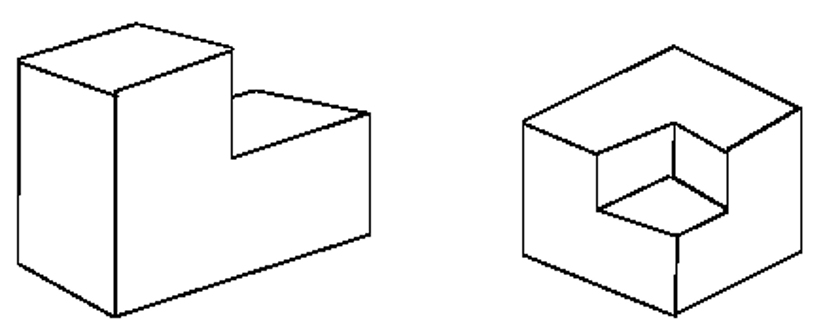
- The Waltz algorithm is for interpreting line drawings of solid polyhedra as 3D objects
- An early example of an AI computation posed as a CSP
- Approach:
- Each intersection is a variable
- Adjacent intersections impose constraints on each other
- Solutions are physically realizable 3D interpretations
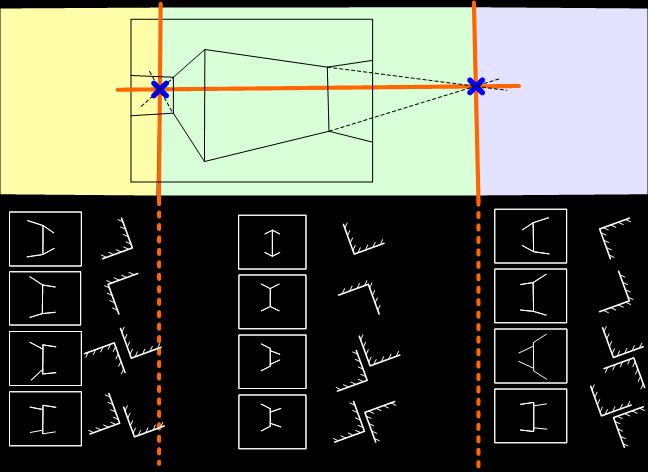
Example: The Waltz Algorithm

Example: The Waltz Algorithm
Variety of CSPs
- Discrete Variables
- Finite domains
- Size $d$ means $O\mathcal(d^n)$ complete assignments
- E.g., Boolean CSPs, including Boolean satisfiability (NP-complete)
- Infinite domains (integers, strings, etc.)
- E.g., job scheduling, variables are start/end times for each job
- Linear constraints solvable, nonlinear undecidable
- Continuous variables
- E.g., start/end times for Hubble Telescope observations
- Linear constraints solvable in polynomial time by LP methods
Varieties of Constraints
- Varieties of Constraints
- Unary constraints involve a single variable (equivalent to reducing domains), e.g.: $SA \neq green$
- Binary constraints involve pairs of variables, e.g.: $SA \neq WA$
- Higher-order constraints involve 3 or more variables: e.g., cryptarithmetic column constraints
- Preferences (soft constraints):
- E.g., red is better than green
- Often representable by a cost for each variable assignment
- Leads to constrained optimization problems
Real-World CSPs
- Scheduling problems: e.g., when can we all meet?
- Timetabling problems: e.g., which class is offered when and where?
- Assignment problems: e.g., who teaches what class
- Hardware configuration
- Transportation scheduling
- Factory scheduling
- Circuit layout
- Fault diagnosis
- $\cdots$
Solving CSPs
Standard Search Formulation
- Standard search formulation of CSPs
- States defined by the values assigned so far (partial assignments)
- Initial state: the empty assignment, {}
- Successor function: assign a value to an unassigned variable
- Goal test: the current assignment is complete and satisfies all constraints
- Start with straightforward search and then improve.
Search Methods
- What would BFS do?
- What would DFS do?
- What problems does naïve search have?
Q & A