Score Matching and Diffusion Models - III
CSE 849: Deep Learning
Recap: Core Idea

- Interpolating between two distributions:
- The data distribution is denoted $p_{data} \in \mathcal{P}(\mathbb{R}_d)$.
- The easy-to-sample distribution is denoted $p_{ref} \in \mathcal{P}(\mathbb{R}_d)$.
- $p_{ref}$ is usually the standard multivariate Gaussian.
- Going from the data to the easy-to-sample distribution: noising process.
- Going from the easy-to-sample to the data distribution: generative process.
- How to invert the forward noising process?
Denoising Diffusion Probabilistic Models

- Denoising Diffusion Probabilistic Models (DDPM (Ho et al., 2020)) is a discrete model with a fixed number of $T=10^3$ steps that performs discrete diffusion.
- Forward model: Discrete variance preserving diffusion (WARNING: Change of notation)
- Distribution of samples: $q(\mathbf{x}_0)$.
- Conditional Gaussian noise: $q(\mathbf{x}_t|\mathbf{x}_{t-1})=\mathcal{N}(\sqrt{1-\beta_t}\mathbf{x}_{t-1}, \beta_t\mathbf{I}_d)$ $$\mathbf{x}_t = \sqrt{1-\beta_t}\mathbf{x}_{t-1} + \beta_t\mathbf{z}_t$$ where the variance schedule $(\beta_t)_{1\leq t\leq T}$ is fixed.
- One step noising $q(\mathbf{x}_t|\mathbf{x}_0)$: with $\alpha_t=1-\beta_t$ and $\bar{\alpha}=\text{cumulative product of } \alpha$ $$\mathbf{x}_t = \bar{\alpha}_t\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\mathbf{z}_t \text{ where } \mathbf{z} \text{ is standard.}$$
Diffusion Forward

Diffusion Backward
- Diffusion parameters are designed such that $q(\mathbf{x}_T)\approx \mathcal{N}(\mathbf{0},\mathbf{I}_d)$
- In general $q(\mathbf{x}_{t-1}|\mathbf{x}_t) \propto q(\mathbf{x}_{t-1})q(\mathbf{x}_t|\mathbf{x}_{t-1})$ is intractable.
Denoising Diffusion Probabilistic Models
- We consider the diffusion as a fixed stochastic encoder.
- We want to learn a stochastic decoder $p_{\theta}$: $$p_{\theta}(\mathbf{x}_{0:T}) = \underbrace{p(\mathbf{x}_T)}_{\text{fixed latent prior}}\prod_{t=1}^T\underbrace{p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t)}_{\text{learnable backward transitions}}$$ with $p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t) = \mathcal{N}(\mu_{\theta}(\mathbf{x}_t,t), \beta_t\mathbf{I}_d)$. $$\text{Compare with: } q(\mathbf{x}_t|\mathbf{x}_{t-1}) = \mathcal{N}(\sqrt{1-\beta_t}\mathbf{x}_{t-1}, \beta_t\mathbf{I}_d)$$
- Recall same diffusion coefficient, new backward drift to be learnt.
- Oversimplified version compared to (Ho et al., 2020), there are ways to also learn the variance for each pixel, see (Nichol and Dhariwal, 2021).
- Then we look for training the decoder by maximizing an ELBO.
DDPM Training Loss
$$\mathbb{E}(-\log p_{\theta}(\mathbf{x}_0)) \leq \mathbb{E}_q\left[-\log\left[\frac{p_{\theta}(\mathbf{x}_{0:T})}{q(\mathbf{x}_{1:T}|\mathbf{x}_0)}\right]\right] := L$$- We have
DDPM: Training Loss continued...
- Computation of $D_{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\|p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t))$
- By Bayes rule, $$q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)=q(\mathbf{x}_t|\mathbf{x}_{t-1},\mathbf{x}_0)\frac{q(\mathbf{x}_{t-1}|\mathbf{x}_0)}{q(\mathbf{x}_t|\mathbf{x}_0)} = q(\mathbf{x}_t|\mathbf{x}_{t-1})\frac{q(\mathbf{x}_{t-1}|\mathbf{x}_0)}{q(\mathbf{x}_t|\mathbf{x}_0)}$$
- Computation shows that this is a normal distribution $\mathcal{N}(\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0),\tilde{\beta}\mathbf{I}_d)$ with $$\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0)=\frac{\sqrt{\bar{\alpha}_{t-1}}\beta_t}{1-\bar{\alpha}_t}\mathbf{x}_0 + \frac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\mathbf{x}_t \text{ and } \tilde{\beta}_t=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}}\beta_t$$
- Using the expression of the KL-divergence between Gaussian distributions, $$D_{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\|p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t)) = \frac{1}{\beta_t}\|\mu_{\theta}(\mathbf{x}_t,t) - \tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0)\|^2 + C$$
DDPM: Noise reparameterization
- Rewrite everything as a function of the added noise $\epsilon$ $$\mathbf{x}_t(\mathbf{x}_0,\epsilon) = \sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\epsilon$$
- Then $\mu_{\theta}(\mathbf{x}_t,t)$ must predict $$\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0)=\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\mathbf{\epsilon}\right)$$
- If we parameterize $$\mu_{\theta}(\mathbf{x}_t,t) = \frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\mathbf{\epsilon_{\theta}(\mathbf{x}_t,t)}\right)$$
- Then the loss is simply $$ \begin{aligned} L_t &= \frac{\beta_t}{1-\bar{\alpha}_t}\mathbb{E}_q\left[\|\epsilon_{\theta}(\mathbf{x}_t,t) - \epsilon\|^2\right] + C \\ & = \frac{\beta_t}{1-\bar{\alpha}_t}\mathbb{E}_q\left[\|\epsilon_{\theta}(\sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\epsilon,t) - \epsilon\|^2\right] + C \end{aligned} $$
- We must predict the noise $\epsilon$ added to $\mathbf{x}_0$ (without knowing $\mathbf{x}_0$).
DDPM: Training and sampling
$$ \begin{aligned} L &= \mathbb{E}_q\left[D_{KL}(q(\mathbf{x}_T|\mathbf{x}_0)\|p(\mathbf{x}_T)) + \sum_{t=2}^TD_{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\|p(\mathbf{x}_{t-1}|\mathbf{x}_t)) - \log p_{\theta}(\mathbf{x}_0|\mathbf{x}_1)\right] \\ &= \sum_{t=2}^T L_t + L_1 + C \end{aligned} $$- The $L_1$ term is dealt differently (to account for discretization of $\mathbf{x}_0$).
- (Ho et al., 2020) proposes to simplify the loss (no constants): $$L_{simple} = \mathbb{E}_{t,\mathbf{x}_0,\mathbf{\epsilon}}\left[\|\mathbf{\epsilon}_{\theta}(\sqrt{\bar{\alpha}}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\mathbf{\epsilon}, t) - \mathbf{\epsilon}\|\right]$$
DDPM: Training and sampling
DDPM: Denoiser
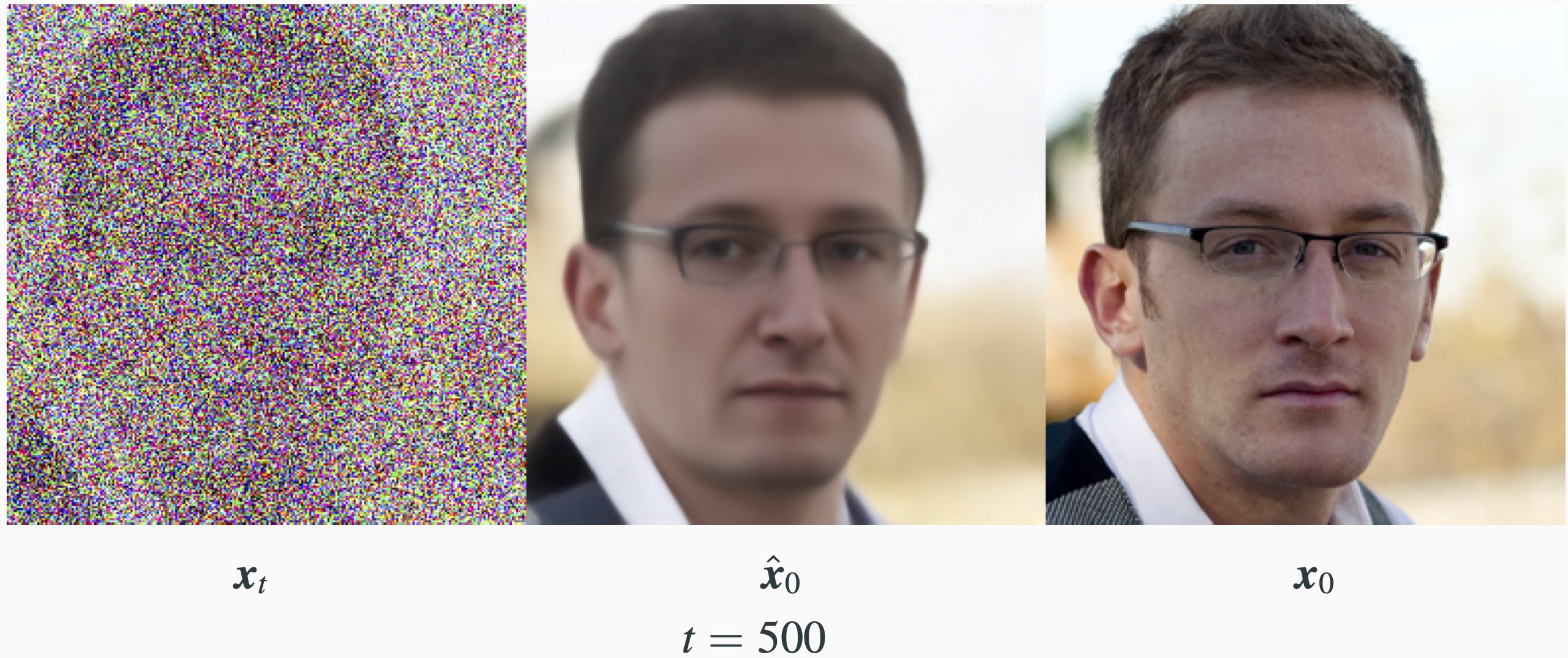
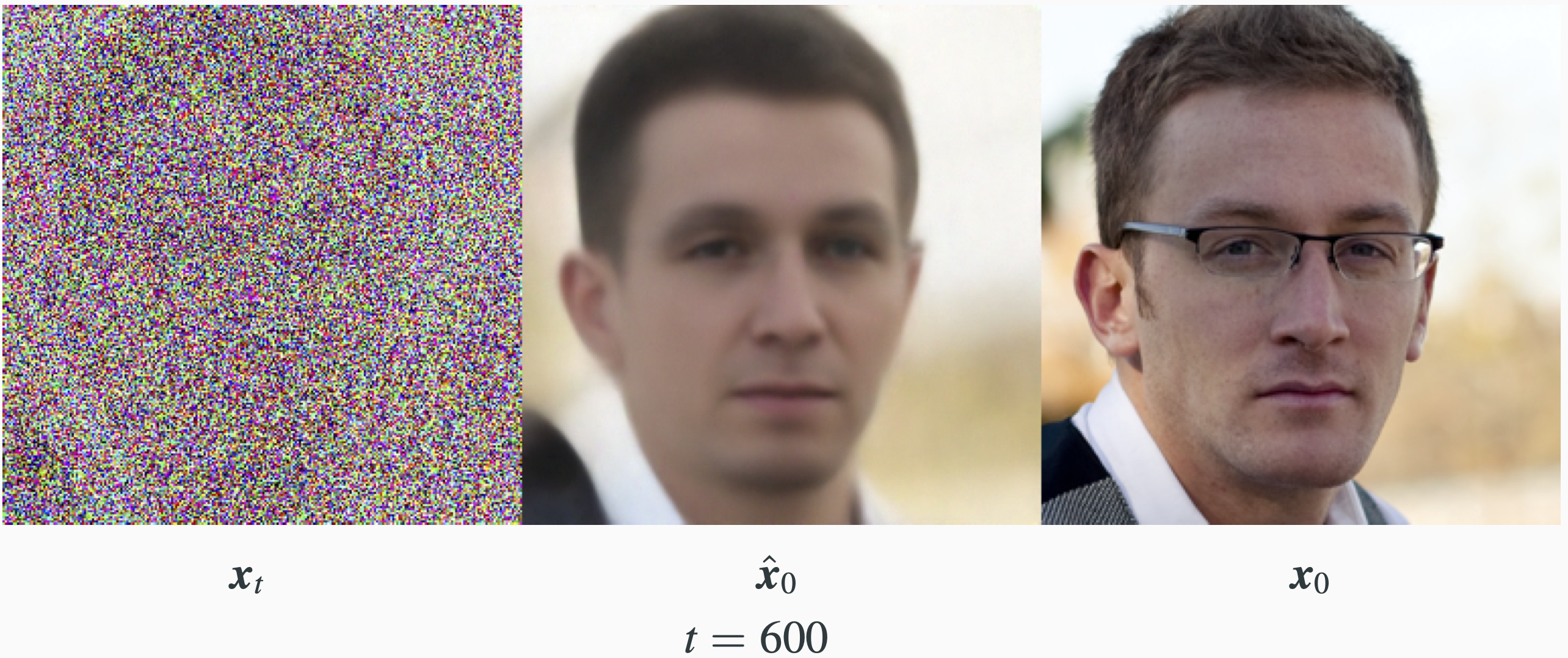
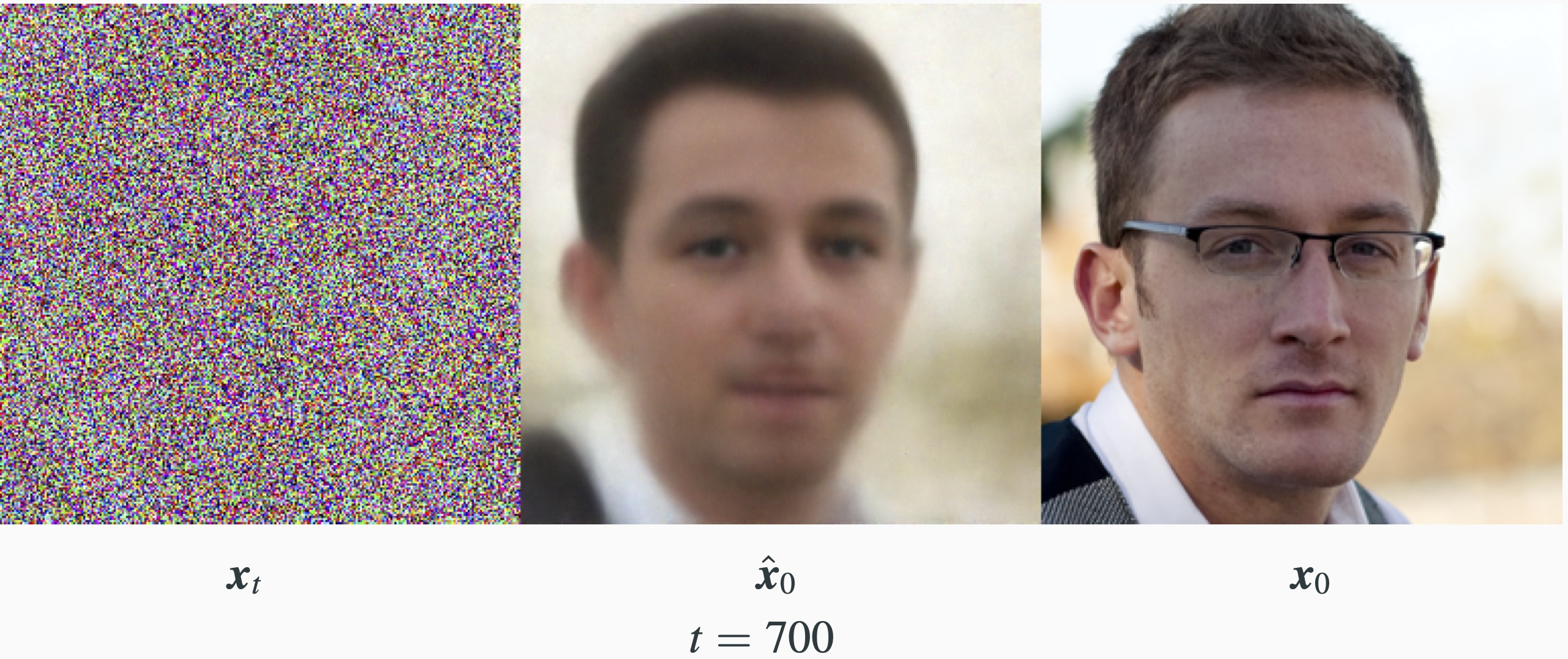
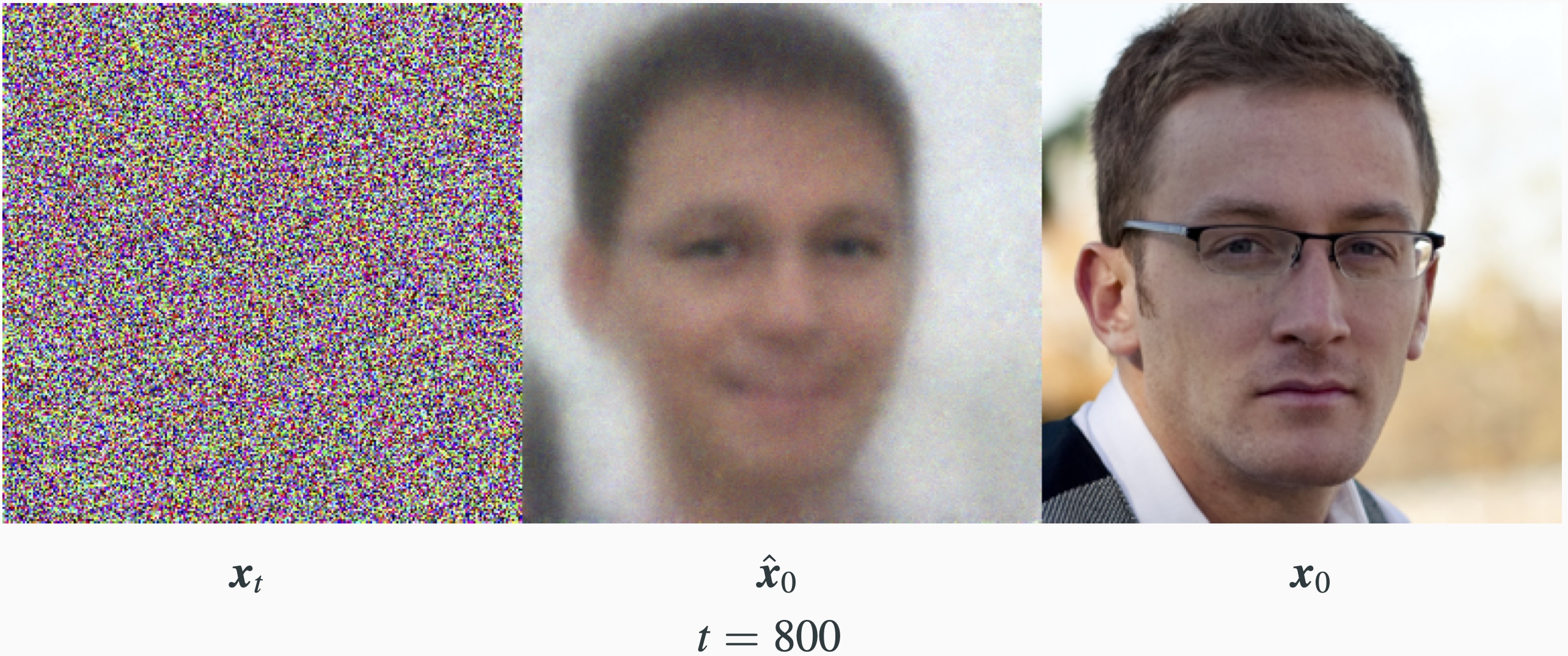
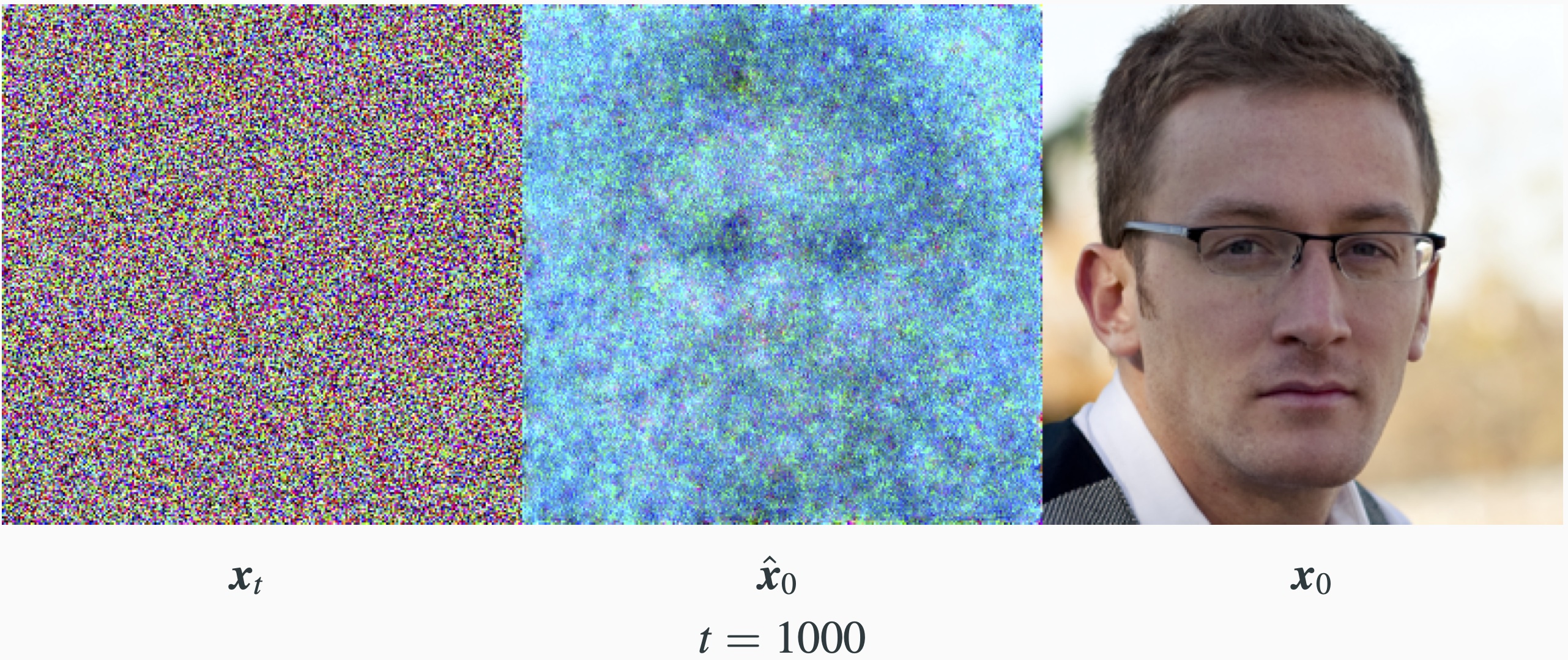
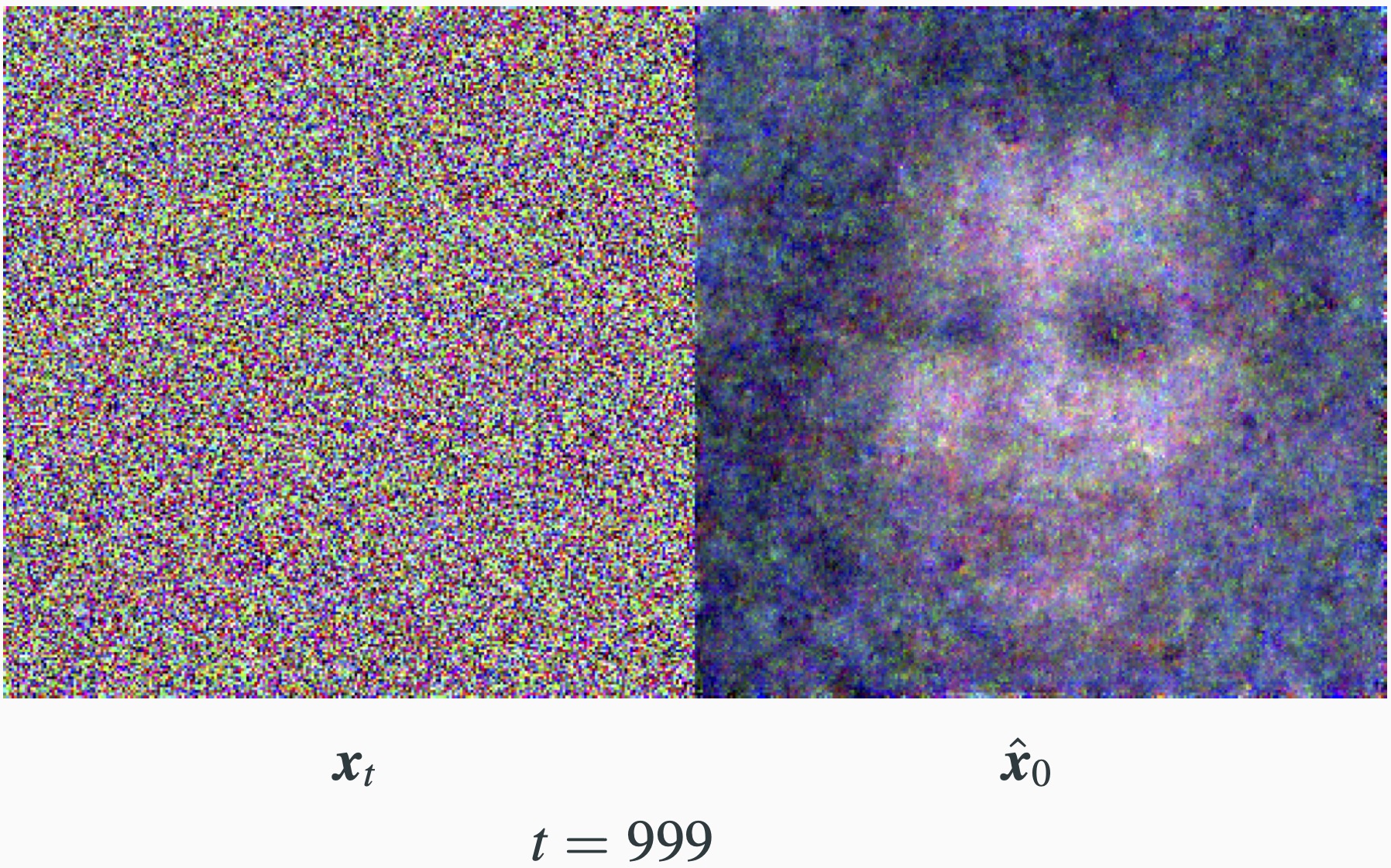
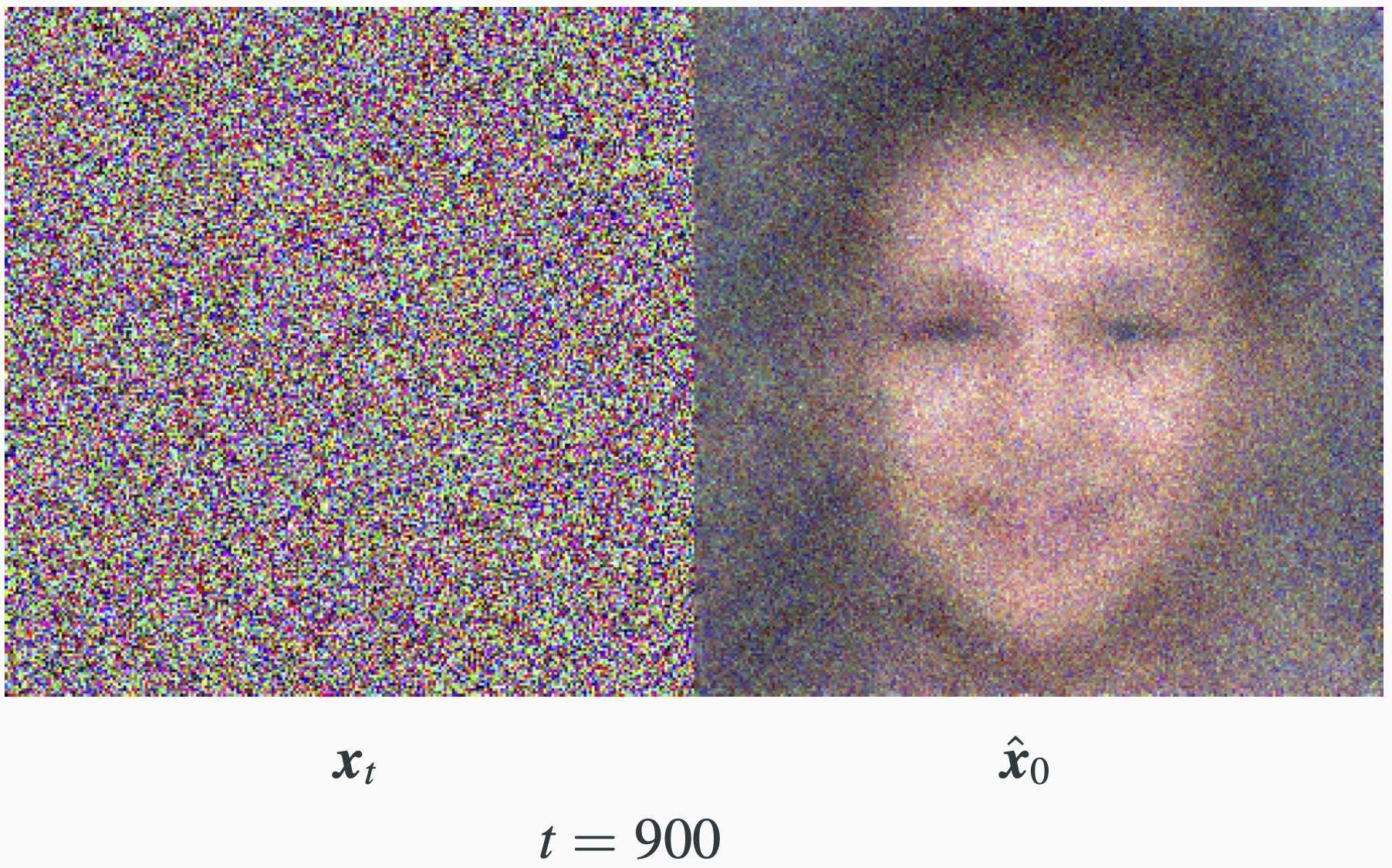
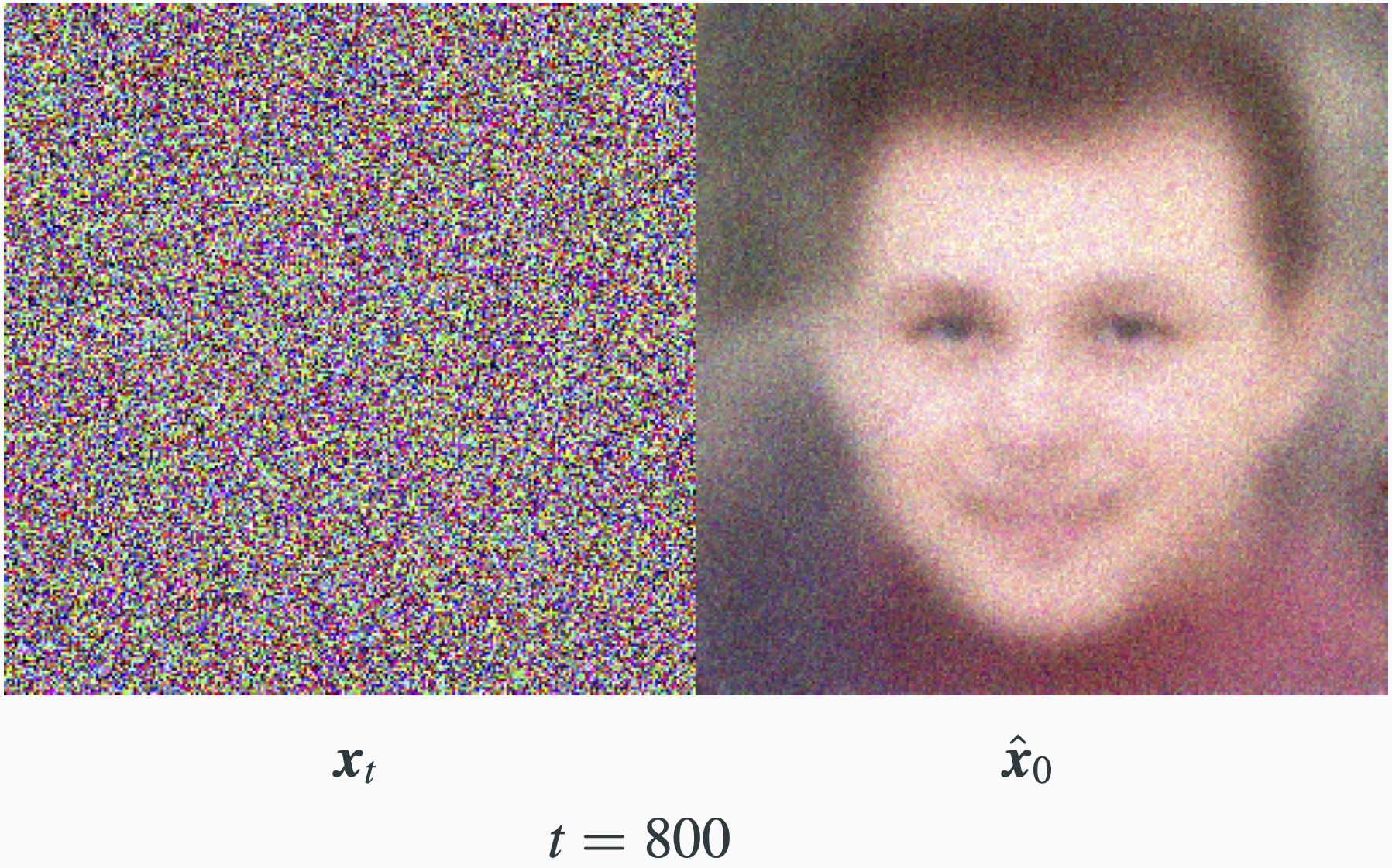
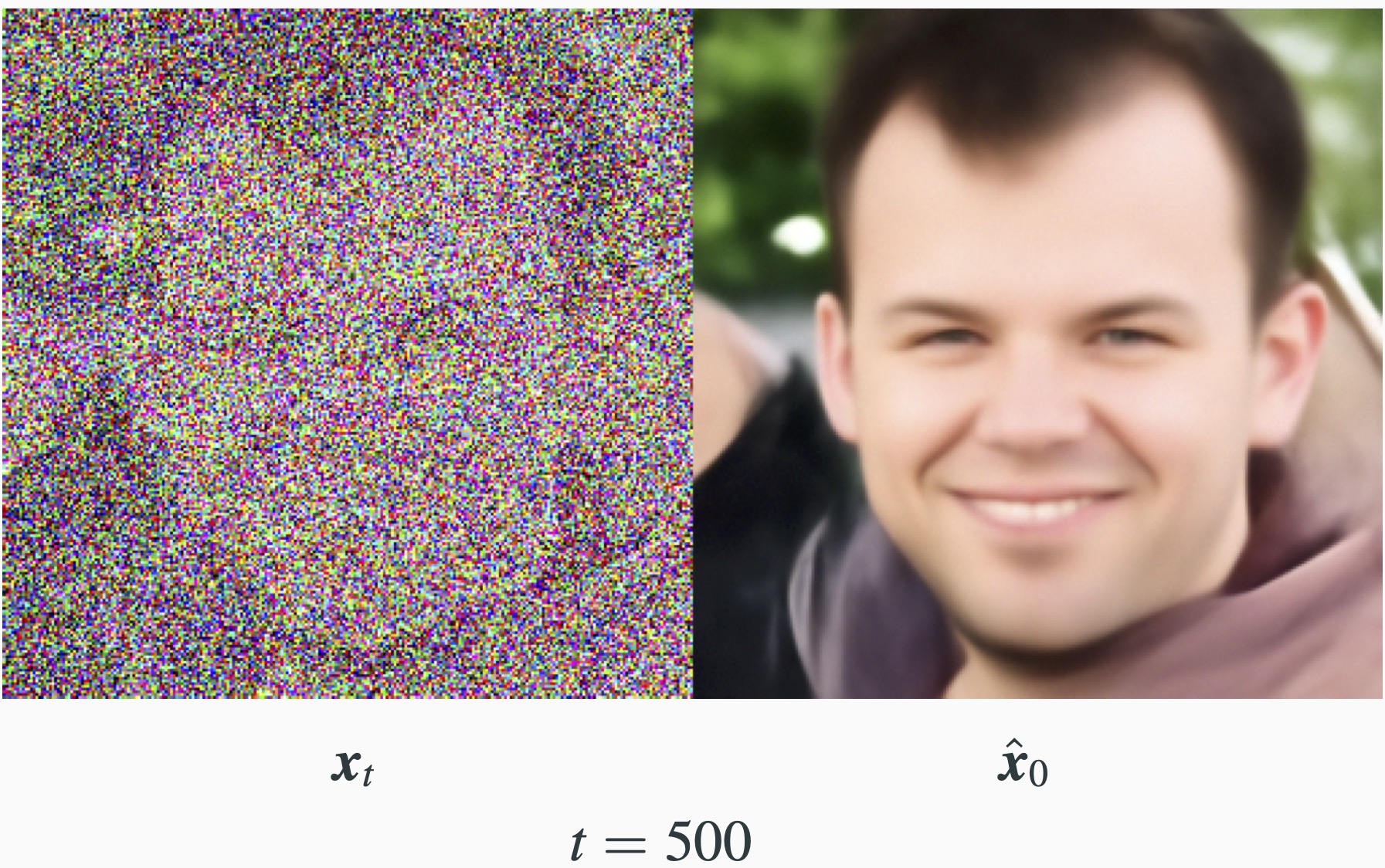
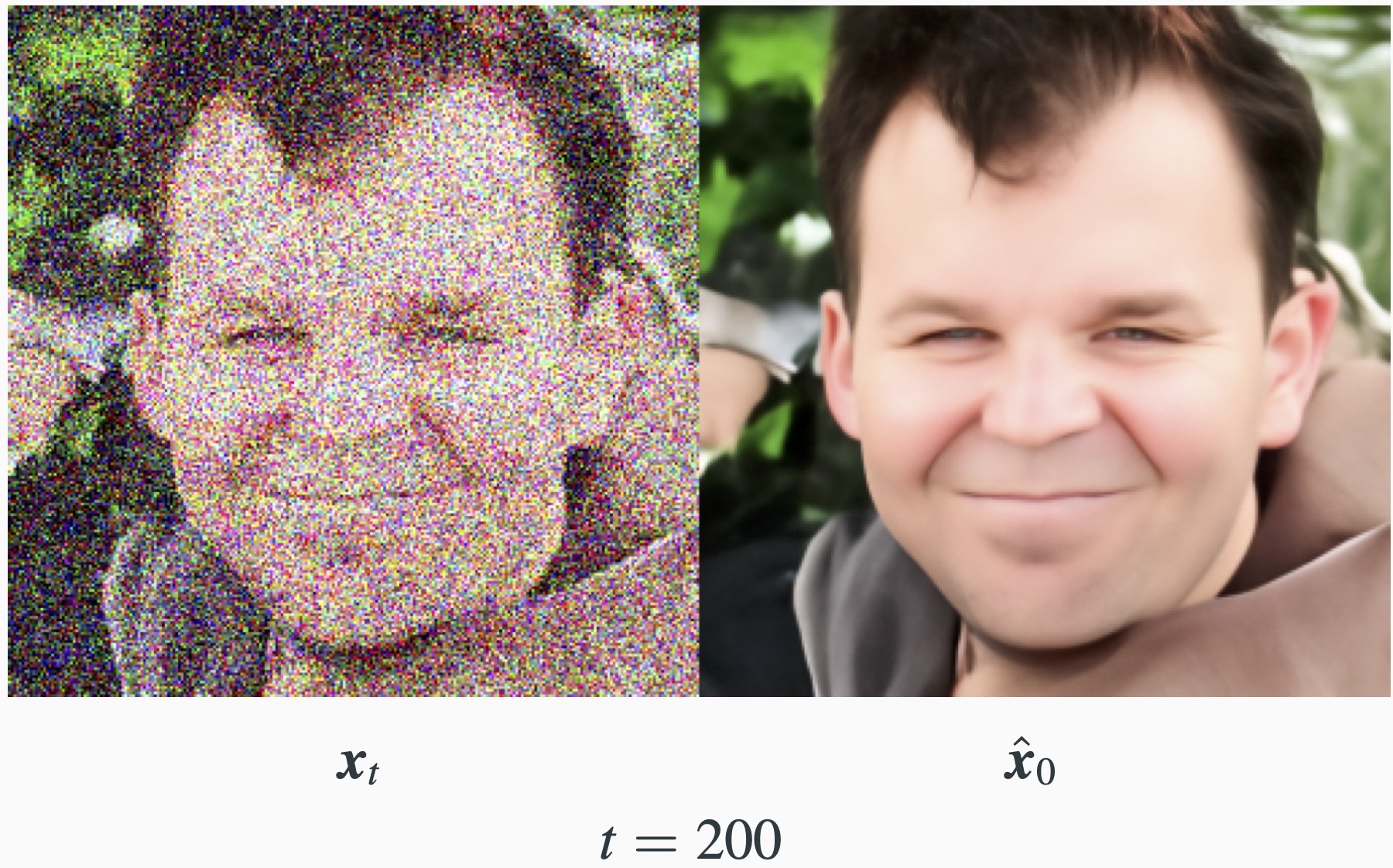
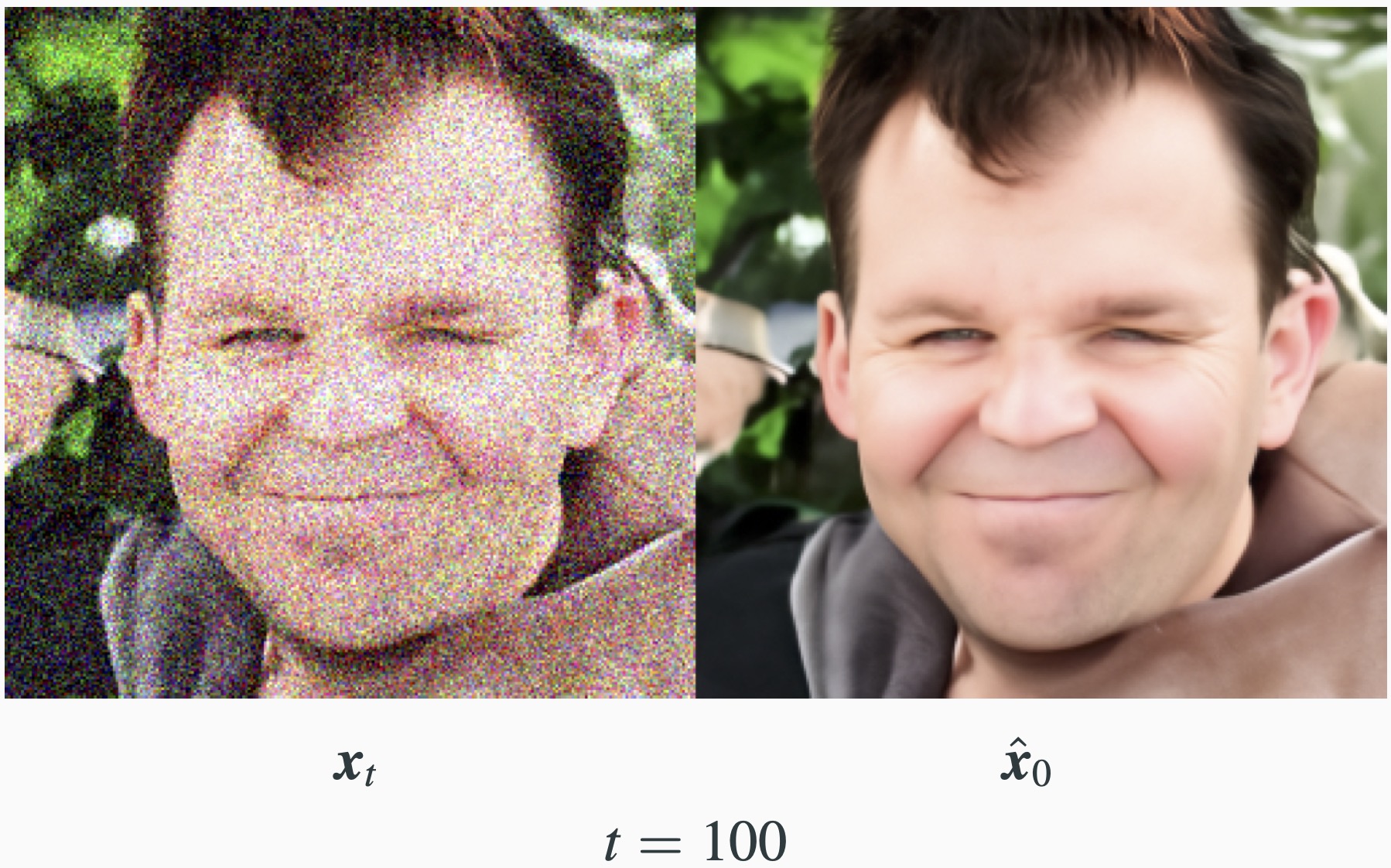
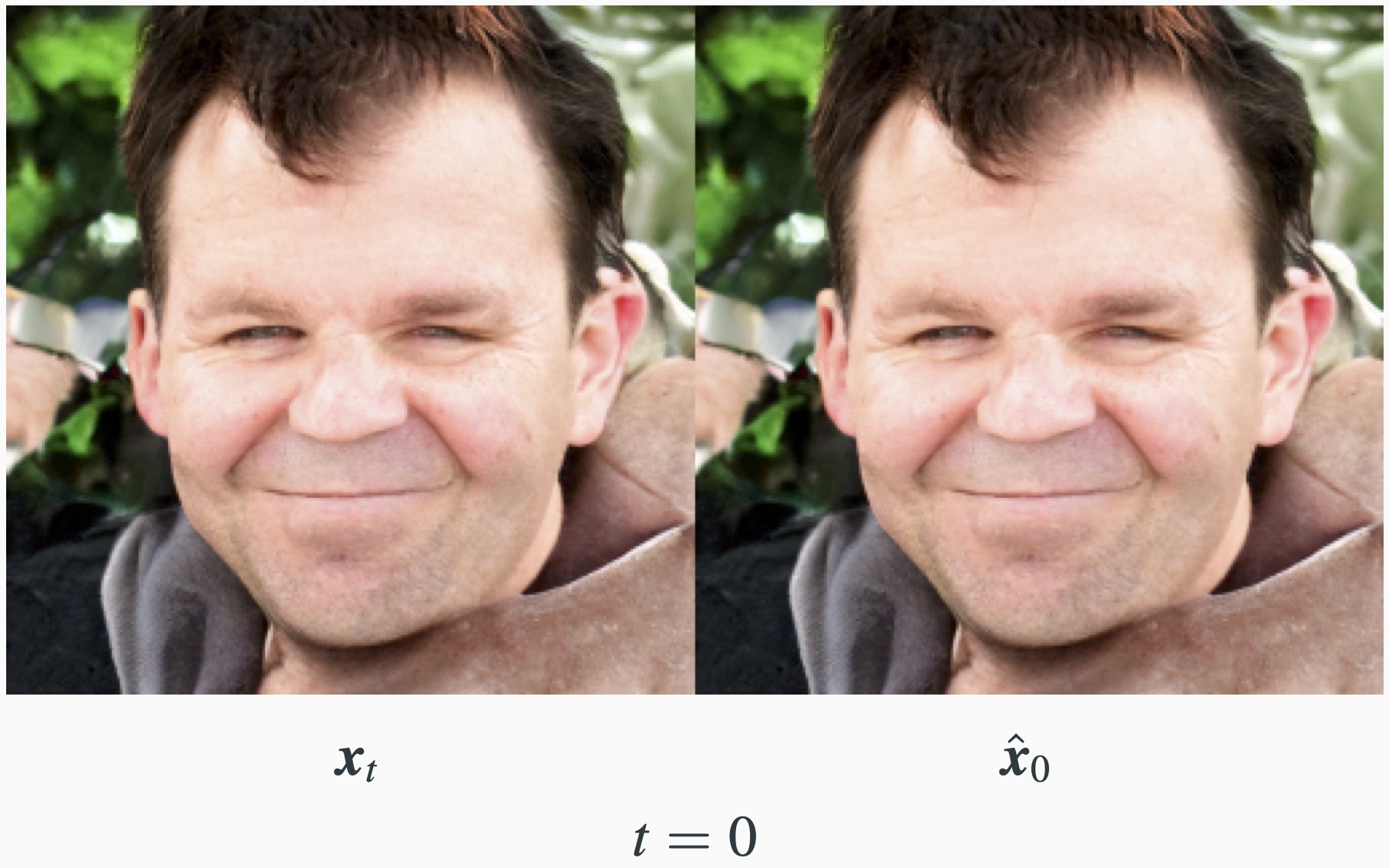
- The U-Net $\epsilon_{\theta}(\mathbf{x}_t,t)$ is a (residual) denoiser that gives an estimation of the noise $\epsilon$ from $$\mathbf{x}_t(\mathbf{x}_0,\epsilon)=\sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\epsilon.$$
- We get the associated estimation of $\mathbf{x}_0$: $$\hat{\mathbf{x}}_0 = \frac{1}{\sqrt{\bar{\alpha}}_t}\mathbf{x}_t - \sqrt{\frac{1}{\bar{\alpha}_t}-1}\epsilon_{\theta}(\mathbf{x}_t,t).$$



DDPM: Sampling




Score Matching and DDPM
- Diffusion model via SDE: (Song et al., 2021)

- Diffusion model via Denoising Diffusion Probabilistic Models (DDPM): (Ho et al., 2020) Discrete model with a fixed number of $T=10^3$.
Score Matching vs DDPM
$$ d\mathbf{x}_t = \mathbf{f}(\mathbf{x}_t, t)dt + g(t)d\mathbf{w}_t$$- Example 1: Variance exploding diffusion (VE-SDE) $$ \begin{aligned} \text{SDE:} & \quad d\mathbf{x}_t = d\mathbf{w}_t \\ \text{Solution:} & \quad \mathbf{x}_t = \mathbf{x}_0 + \mathbf{w}_t \\ \text{Variance:} & \quad Var(\mathbf{x}_t) = Var(\mathbf{x}_0) + t \end{aligned} $$
- Example 2: Variance preserving diffusion (VP-SDE) $$ \begin{aligned} \text{SDE:} & \quad \mathbf{x}_t = -\beta_t\mathbf{x}_tdt + \sqrt{2\beta_t}d\mathbf{w}_t \\ \text{Solution:} & \quad \mathbf{x}_t = e^{-B_t}\mathbf{x}_0 + \int_{0}^te^{B_2-B_t}\sqrt{2\beta_s}d\mathbf{w}_s \text{ with } B_t=\int_{0}^t\beta_tdt \\ \text{Variance:} & \quad Var(\mathbf{x}_t) = e^{-2B_t}Var(\mathbf{x}_0) + 1 - e^{-2B_t} \end{aligned} $$
- Both variants have the form $\mathbf{x}_t = \alpha_t \mathbf{x}_0 + \beta_t \mathbf{Z}_t: \mathbf{x}_t$ is a rescaled noisy version of $\mathbf{x}_0$ and the noise is more and more predominant as time grows.
Continuous Diffusion Models
- Forward diffusion: $$d\mathbf{x}_t = \mathbf{f}(\mathbf{x}_t, t)dt + g(t)d\mathbf{w}_t$$
- Backward diffusion: $\mathbf{y}_t = \mathbf{x}_{T-t}$ $$d\mathbf{y}_t = -\mathbf{f}(\mathbf{y}_t, T-t)dt + g(T-t)d\mathbf{w}_t$$
- Learn score by denoising score matching: $$\theta^{*} = arg\min \mathbb{E}_t\left(\lambda_t\mathbb{E}_{(\mathbf{x}_0, \mathbf{x}_t)}\|s_{\theta}(\mathbf{x}_t,t) - \nabla_{\mathbf{x}_t}\log p_{t|0}(\mathbf{x}_t|\mathbf{x}_0)\|^2\right) \text{ with } t \sim U([0,T])$$
- Generate samples by SDE discrete scheme (e.g. Euler-Maruyama): $$\mathbf{Y}_{n-1} = \mathbf{Y}_n - hf(\mathbf{Y}_n, t_n) +hg(t_n)^2\mathbf{s}_{\theta}(\mathbf{Y}_n, t_n) + g(t_n)\sqrt{h}\mathbf{Z}_n \text{ with } \mathbf{Z}_n \sim \mathcal{N}(\mathbf{0}, \mathbf{I}_d)$$
- Associated deterministic probability flow: $$d\mathbf{y}_t = \left[-\mathbf{f}(\mathbf{y}_t, T-t) + \frac{1}{2}g(T-t)^2\nabla_{\mathbf{x}}\log p_{T-t}(\mathbf{y}_t)\right]dt$$
Denoising Diffusion Probabilistic Models (DDPM)
- Forward Diffusion: $$q_{\theta}(\mathbf{x}_{0:T}) = \underbrace{q(\mathbf{x}_0)}_{\text{data distribution}}\prod_{t=1}^T\underbrace{q(\mathbf{x}_{t}|\mathbf{x}_{t-1})}_{\text{fixed forward transition}} \text{ with } q(\mathbf{x}_{t}|\mathbf{x}_{t-1}) = \mathcal{N}(\sqrt{1-\beta_t}\mathbf{x}_{t-1}, \beta_t\mathbf{I}_d)$$
- Backward diffusion: stochastic decoder $p_{\theta}$: $$p_{\theta}(\mathbf{x}_{0:T}) = \underbrace{p(\mathbf{x}_T)}_{\text{fixed latent prior}}\prod_{t=1}^T\underbrace{p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t)}_{\text{learnable backward transitions}} \text{ with } \underbrace{p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t) = \mathcal{N}(\mu_{\theta}(\mathbf{x}_t,t), \beta_t\mathbf{I}_d)}_{\text{Gaussian approximation of } q(\mathbf{x}_{t-1}|\mathbf{x}_t)}$$
Denoising Diffusion Probabilistic Models (DDPM)
- Learn the score by minimizing the ELBO (like for VAE): This boils down to denoising the diffusion iterations $\mathbf{x}_t = \sqrt{\bar{\alpha}}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}}\epsilon$ $$\theta^{*} = arg\min\sum_{t=1}^T \frac{\beta_t}{1-\bar{\alpha}_t}\mathbb{E}_q\left[\|\mathbf{\epsilon}_{\theta}(\mathbf{x}_t, t)-\mathbf{\epsilon}\|^2\right] + C$$
- Sampling through the stochastic decoder with $$ \mu_{\theta}(\mathbf{x}_t, t) = \frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\epsilon_{\theta}(\mathbf{x}_t, t)\right)$$
DDPM Training and Score Matching
- Posterior mean training: Recall that $\mu_{\theta}(\mathbf{x}_t,t)$ minimizes $$ \mathbb{E}_q[D_{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t)\|p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_t))] = \frac{1}{\beta_t}\mathbb{E}_{q}\left[\|\mu_{\theta}(\mathbf{x}_t,t)-\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0)\|^2\right] + C$$ where $\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0)$ is the mean of $q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)$. Hence ideally, $$\mu_{\theta}(\mathbf{x}_t,t) = \mathbb{E}[\tilde{\mu}(\mathbf{x}_t,\mathbf{x}_0|\mathbf{x}_t)] = \mathbb{E}[\mathbb{E}[\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0]|\mathbf{x}_t] = \mathbb{E}[\mathbf{x}_{t-1}|\mathbf{x}_t]$$
- Noise prediction training: $\epsilon_{\theta}(\mathbf{x}_t,t)$ minimizes $$\mathbb{E}\left[\|\epsilon_{\theta}(\mathbf{x}_t,t)-\epsilon\|^2\right]$$ where $\epsilon$ is a function of $(\mathbf{x}_t,\mathbf{x}_0)$ since $\mathbf{x}_t=\sqrt{\bar{\alpha}}\mathbf{x}_0+\sqrt{1-\bar{\alpha}}\epsilon$. Hence ideally, $$\epsilon_{\theta}(\mathbf{x}_t,t) = \mathbb{E}[\epsilon|\mathbf{x}_t]$$
- Score matching training: Ideally, $$s_{\theta}(\mathbf{x}_t,t) = \nabla_{\mathbf{x}_t}\log p_t(\mathbf{x}_t) = \mathbb{E}[\nabla_{\mathbf{x}_t}\log p_t(\mathbf{x}_t|\mathbf{x}_0)|\mathbf{x}_t]$$
Tweedie Formulae
- We derived the formulae for DDPM training without considering the score function.
- But denoising and score functions are linked by Tweedie formulae:

Tweedie Formulae
- Theorem (Tweedie Formulae)
$$ \begin{aligned} \text{Tweedie denoiser:} & \quad \mathbb{E}[X|Y] = \frac{1}{a}\left(Y + \sigma^2\nabla_Y\log p_Y(Y)\right) \\ \text{Tweedie noise predictor:} & \quad \mathbb{E}[Z|Y] = -\sigma\nabla_{\mathbf{y}}\log p_Y(Y) \end{aligned} $$
- If $Y=aX + \sigma Z$ with $Z\sim\mathcal{N}(0, I_d)$ independent of $X$, $a > 0, \sigma > 0$, then
DDPM and Tweedie
- If $Y=aX + \sigma Z$ with $Z\sim\mathcal{N}(0, I_d)$ independent of $X$, $a > 0, \sigma > 0$, then $$ \begin{aligned} \text{Tweedie denoiser:} & \quad \mathbb{E}[X|Y] = \frac{1}{a}\left(Y + \sigma^2\nabla_Y\log p_Y(Y)\right) \\ \text{Tweedie noise predictor:} & \quad \mathbb{E}[Z|Y] = -\sigma\nabla_{\mathbf{y}}\log p_Y(Y) \end{aligned} $$
- Tweedie for noise prediction: Predict the noise $\epsilon$ from $\mathbf{x}_t$: $$\mathbf{x}_t = \sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\epsilon \Rightarrow \color{orange}{\mathbb{E}[\mathbf{\epsilon}|\mathbf{x}_t] = -\sqrt{1-\bar{\alpha}}\nabla_{\mathbf{x}_t}\log p_t(\mathbf{x}_t)}$$
- Tweedie for one-step denoising: Predict $\mathbf{x}_{t-1}$ from $\mathbf{x}_t$: $$\mathbf{x}_t = \sqrt{\alpha_t}\mathbf{x}_{t-1} + \sqrt{\beta_t}\mathbf{z}_t \Rightarrow \mathbb{E}[\mathbf{x}_{t-1}|\mathbf{x}_t] = \frac{1}{\sqrt{\alpha}_t}\left(\mathbf{x}_t + \beta_t \nabla_{\mathbf{x}_t}\log p_t(\mathbf{x}_t)\right)$$ $$\color{orange}{\mathbb{E}[\mathbf{x}_{t-1}|\mathbf{x}_t] = \frac{1}{\sqrt{\alpha}_t}\left(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\mathbb{E}[\mathbf{\epsilon}|\mathbf{x}_t]\right)}$$ $$\mu_{\theta}(\mathbf{x}_t,t)=\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\epsilon_{\theta}(\mathbf{x}_t,t)\right)$$
Summary of Diffusion Models
- The two training strategies are the same (up to weighting constants)
- The only difference between the continuous SDE model and the discrete DDPM model are the time values: $t \in [0, T]$ vs. $t = 1, \dots, T=10^3$.
- Good news: We can train a DDPM and use it for a deterministic probability flow ODE (this is what is done by the DDIM model (Song et al., 2021)).