Score Matching and Diffusion Models - IV
CSE 849: Deep Learning
Today
- Sampling from Diffusion Models
- Solving Inverse Problems with Diffusion Models
- Latent Diffusion
- Personalization
- ControlNet
- Flow Matching
Classifier Guidance
- Slide Credit: Arash Vahdat
Classifier-Free Guidance
- Slide Credit: Arash Vahdat
Text Guidance

- Slide Credit: Arash Vahdat
Diffusion Posterior Sampling
- Diffusion Posterior Sampling (DPS) for general noisy inverse problems.

Conditional Sampling
- Let $A$ be a linear operator for an inverse problem (masking operator for inpainting, blur operator for deblurring, subsampling for SR, etc.).
- The observation model is, $$\mathbf{y} = A\mathbf{x}_{unknown} + \mathbf{\epsilon}, \quad \mathbf{\epsilon} \sim \mathcal{N}(0, \sigma^2I).$$
- We would like to sample, $$p_0(\mathbf{x}_0|A\mathbf{x}_0 + \mathbf{\epsilon} = \mathbf{y}) = p_0(\mathbf{x}_0|\mathbf{y})$$ to estimate $\mathbf{x}_{unknown}$ with the prior of the generative model.
Conditional Sampling Continued...
- From (Song et al. 2021), we can consider the SDE for the conditional distribution $p_0(\mathbf{x}_0|\mathbf{y})$:
- Backward diffusion for VP_SDE: $\mathbf{y}_t = \mathbf{x}_{T-t}$ $$d\mathbf{y}_t = [\beta_{T-t}\mathbf{y}_t + \beta_{T-t}\nabla_{\mathbf{x}=\mathbf{y}_t}\log p_{T-t}(\mathbf{y}_t|\mathbf{y})]dt + \beta{T-t}d\mathbf{w}_t.$$
- By Bayes rule: $$\log p_{T-t}(\mathbf{y}_t|\mathbf{y})=\log p_{T-t}(\mathbf{y}|\mathbf{y}_t) + \log(p_{T-t}(\mathbf{y}_t)) - \log(p_{T-t}(\mathbf{y}))$$
- Thus, $$\nabla_{\mathbf{x}==\mathbf{y}_t}\log p_{T-t}p(\mathbf{y}_t|\mathbf{y}) = \underbrace{\nabla_{\mathbf{x}=\mathbf{y}_t}\log p_{T-t}(\mathbf{y}_t|\mathbf{y})}_{\color{orange}{\text{intractable}}} + \underbrace{\nabla_{\mathbf{x}=\mathbf{y}_t}\log(p_{T-t}(\mathbf{y}_t))}_{\color{green}{\text{usual score function}}}$$
- For clarity, $$\nabla_{\mathbf{x}==\mathbf{y}_t}\log p_{T-t}p(\mathbf{y}_t|\mathbf{y}) = \nabla_{\mathbf{x}=\mathbf{x}_t}\log p_{t}(\mathbf{y}|\mathbf{x}_t)$$
Conditional Sampling Continued...
- (Chung et al., 2023) propose the following approximation: $$\log p_t(\mathbf{y}|\mathbf{x}_t) \approx \log p_t(\mathbf{y}|\mathbf{x}_0=\hat{\mathbf{x}}_0(\mathbf{x}_t,t))$$ with $\hat{\mathbf{x}}_0(\mathbf{x}_t,t)$ the estimate of the original image from the network.
- Since $$p(\mathbf{y}|\mathbf{x}_0) = \frac{1}{(2\pi\sigma)^{\frac{n}{2}}}\exp\left(-\frac{\|\mathbf{y}-A\mathbf{x}_0\|}{2\sigma^2}\right)$$ we finally approximate $$\nabla_{\mathbf{x}=\mathbf{x}_t}\log p_t(\mathbf{y}|\mathbf{x}_t) = -\frac{1}{2\sigma^2}\nabla_{\mathbf{x}_t}\|\mathbf{y}-A\bar{\mathbf{x}}_0(\mathbf{x}_t,t)\|^2$$
- Computing $\nabla_{\mathbf{x}_t}\|\mathbf{y} - A\hat{\mathbf{x}}_0(\mathbf{x}_t,t)\mathbf{x_0}\|^2$ involves a back propagation through the UNet.
- So the conditional sampling will be twice as expensive as the sampling procedure.
Diffusion Posterior Sampling
- Usual DDPM sampling (notation with $\hat{\mathbf{x}}_0(\mathbf{x}_t,t)$ instead of $\epsilon_{\theta}(\mathbf{x}_t,t)$) $$\mu_{\theta}(\mathbf{x}_t,t)=\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{\beta_t}{\sqrt{1-\bar{\alpha}}_t}\epsilon_{\theta}(\mathbf{x}_t,t)\right) = \frac{\sqrt{\alpha}_t(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\mathbf{x}_t + \frac{\sqrt{\bar\alpha}_{t-1}\beta_t}{1-\alpha}\hat{\mathbf{x}}_0(\mathbf{x}_t,t)$$
- Add a correction term to drive $A\hat{\mathbf{x}}_0(\mathbf{x}_t,t)$ close to $\mathbf{y}$.
- In practice $\zeta_i=\zeta_t=\|\mathbf{y}-A\bar{\mathbf{x}}_0(\mathbf{x}_t,t)\|^{-1}$.
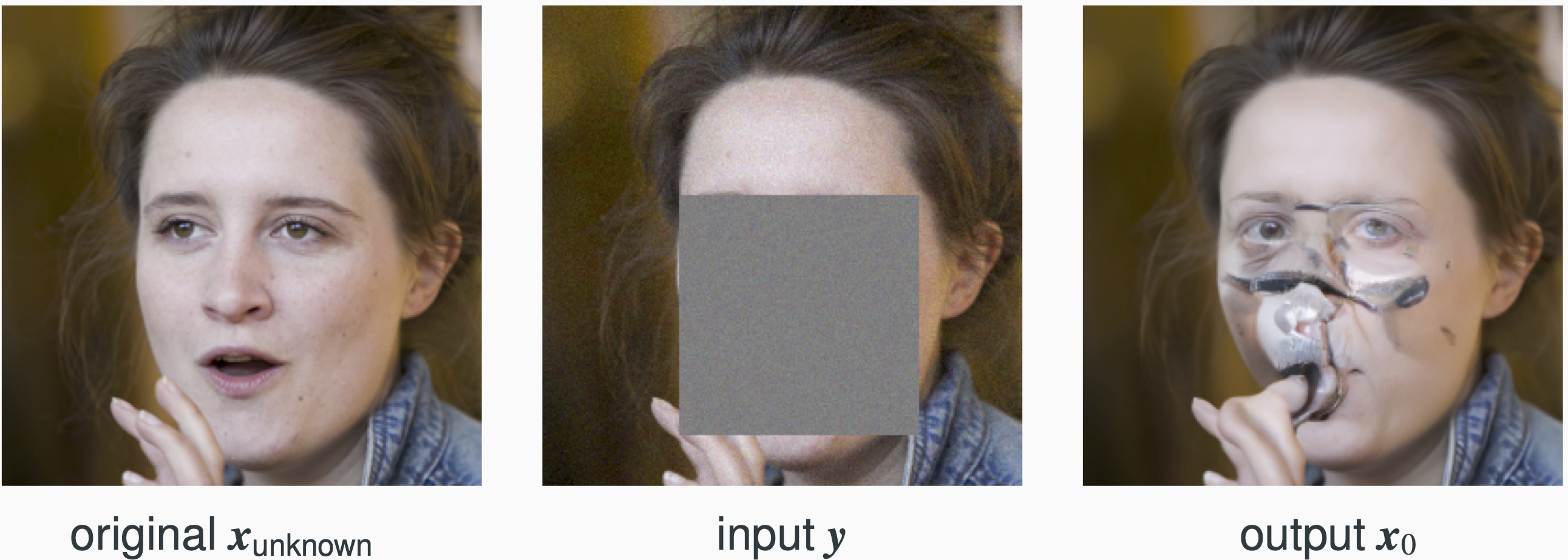
Diffusion Posterior Sampling: Inpainting
- Very good results in terms of perceptual metric (LPIPS).
- Lack symmetry
- It can sometimes be really bad though!

RePaint

RePaint

RePaint


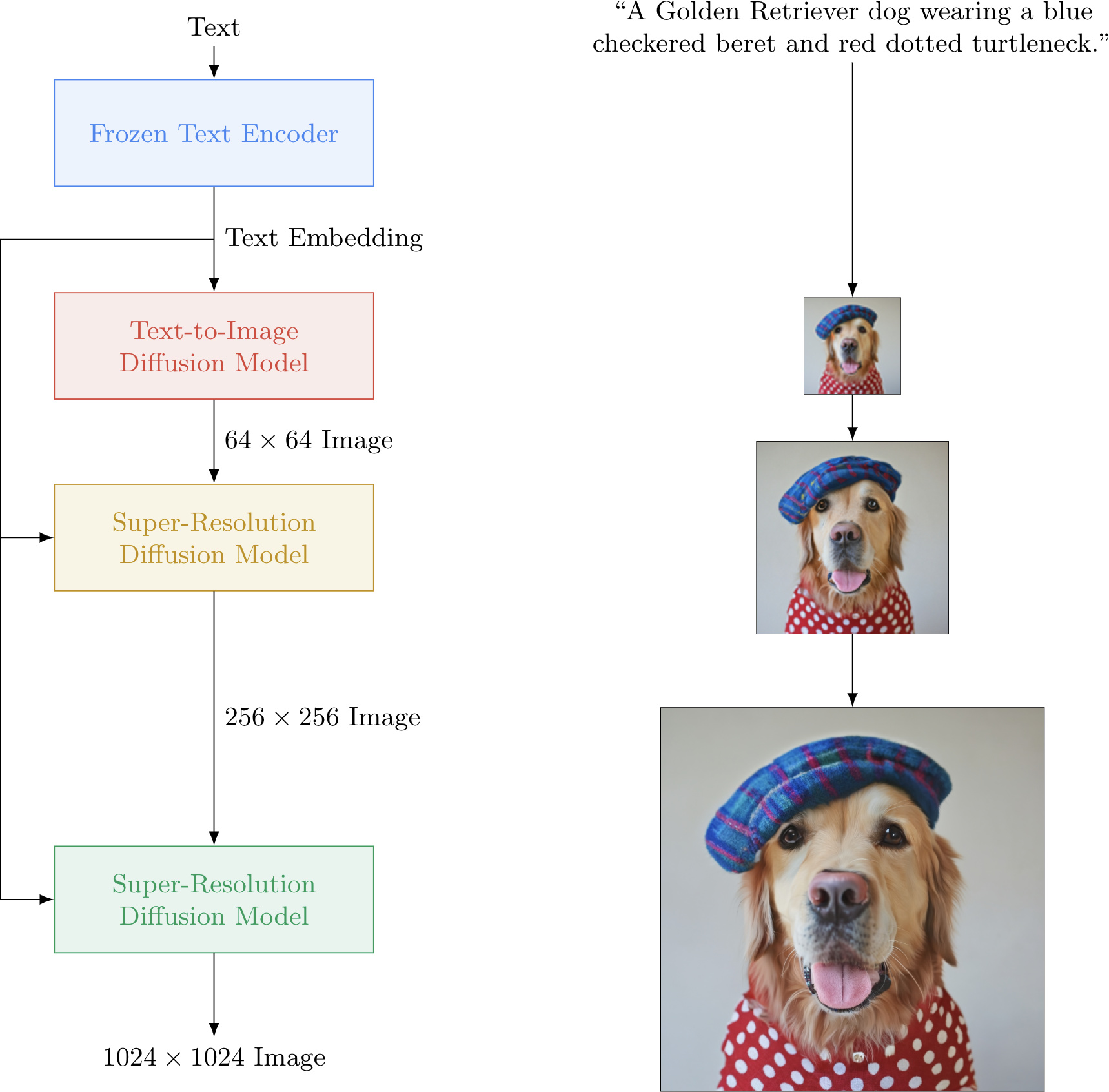
Conditional DDPM for Super-Resolution
- Super-resolution is often used to improve the quality of generated images.
- One can train a specific DDPM for this task by conditioning the Unet with the low resolution image $\epsilon_{\theta}(\mathbf{x}_t,\mathbf{y}_{LR},t)$.
- (Saharia et al., 2023) To condition the model on the input $\mathbf{y}_{LR}$, we upsample the low-resolution image to the target resolution using bicubic interpolation. The result is concatenated with $\mathbf{x}_t$ along the channel dimension.
Conditional DDPM for Super-Resolution
Latent Diffusion Model
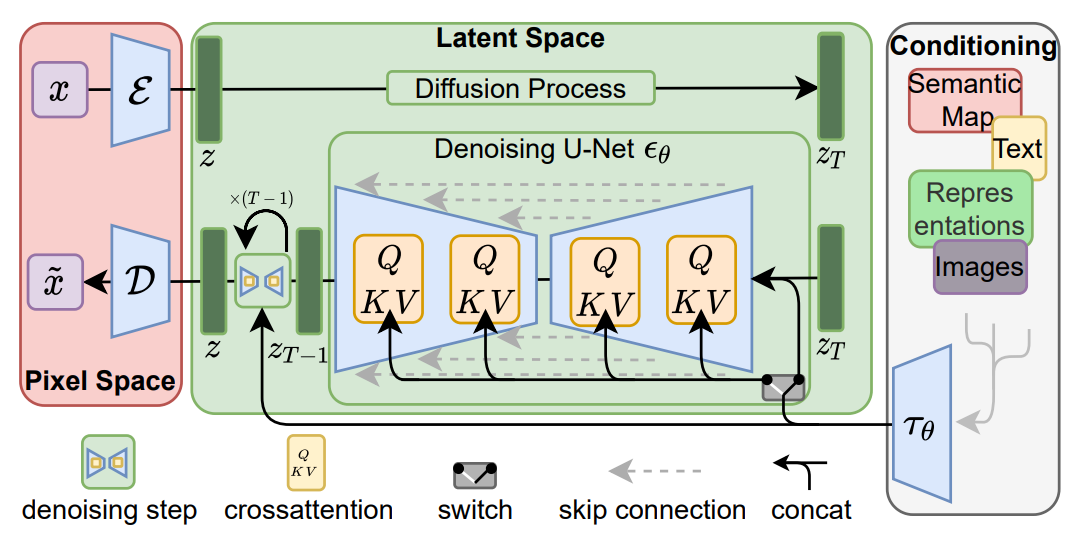
- The distribution of latent embeddings close to Normal distribution -> Simpler denoising, Faster Synthesis!
- (2) Augmented latent space -> More expressivity!
- Tailored Autoencoders -> More expressivity, Application to any data type (graphs, text, 3D data, etc.)!
Latent Diffusion Model: Results

Latent Diffusion Model: AutoEncoder
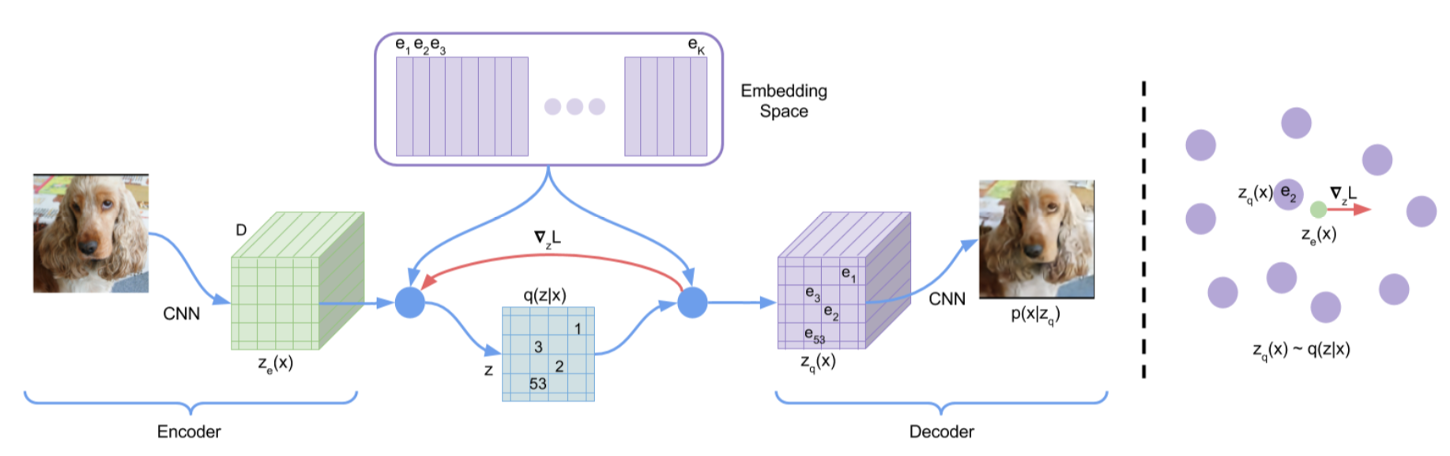 \begin{equation}
L = \log p(x|z_q(x)) + \|sg[z_e(x)]-e\|_2^2 + \beta\|z_e(x)-sg[e]\|_2^2
\end{equation}
\begin{equation}
L = \log p(x|z_q(x)) + \|sg[z_e(x)]-e\|_2^2 + \beta\|z_e(x)-sg[e]\|_2^2
\end{equation}
Video Diffusion Model
Welcome to the Future, Today!
ControlNet
ControlNet: How it Works

ControlNet

Flows as Generative Models

- Slide Credit: Yaron Lipman
Training Flow Models
$$\min D_{KL}(q||p) = -\mathbb{E}_{x\sim q}\color{red}{\log p_1(x)}+c$$
- Continuity Equation (fixed x): $$\frac{\partial p_t}{\partial t} = -\nabla\cdot(p_tv_t)$$
- Instantaneous change of coordinates (trajectory $x_t$) $$\color{red}{\frac{d\log p_t(x_t)}{dt} = -\nabla\cdot v_t(x_t)}$$
- Problem: Needs forward simulation.
- We want a simulation free flow matching method
Flow Matching

- Slide Credit: Yaron Lipman
Flow Matching
- Slide Credit: Yaron Lipman
Flow Matching
- Slide Credit: Yaron Lipman
Flow Matching Vector Field
- Flow Matching: Random Pairing $$ \begin{aligned} z &= (x_0, x_1) \\ q(z) &= q(x_0)q(x_1) \\ p_t(x|z) &= \mathcal{N}(x; tx_1 + (1-t)x_0, \sigma^2) \\ u_t(x|z) &= x_1 - x_0 \end{aligned} $$
- Flow Matching: Optimal Transport Pairing $$ \begin{aligned} z &= (x_0, x_1) \\ q(z) &= \pi(x_0, x_1) \\ p_t(x|z) &= \mathcal{N}(x; tx_1 + (1-t)x_0, \sigma^2) \\ u_t(x|z) &= x_1 - x_0 \end{aligned} $$
CVPR 2022 Tutorial
CVPR 2023 Tutorial
Parting Thoughts
- Diffusion Models:
- (Latent) diffusion models have become a mature framework for generative modeling.
- They are large models that require very long training with very large datasets.
- But once trained they can be used as generic image priors.
- Latent Diffusion Models:
- Latent diffusion models allow for new image editing/generation techniques.
- Bridge between NLP and image modeling.
- Latent diffusion models are booming for video generation from text.
- Can be applied to any modality with some structured latent space, but not SOTA for all modalities (e.g. not (yet?) competitive for text generation).
Parting Thoughts
- Flow Matching: New kid on the block. "Stable Diffusion 3" id based on it.
